强化理论#
强化理论(Reinforcement Theory):强化理论是一种行为学习理论,认为行为可以通过奖赏和惩罚来改变。
- 通过奖励和惩罚的方式可以改变智能体的行为方式
- 这是强化理论的基本思想。通过提供奖励(正强化)或惩罚(负强化),可以影响智能体的行为,使其趋向于某种特定的行为模式。
- 正强化:当智能体表现出期望行为时,给予 奖励,从而增加该行为的发生频率。
- 负强化:当智能体表现出不期望行为时,给予 惩罚,从而减少该行为的发生频率。
- 随机奖励可以使智能体上瘾
- 随机奖励指的是 不确定何时会获得奖励的机制。研究表明,这种不确定性会使智能体更投入于某种行为,因为它们总是期待下一次可能的奖励。
- 这种机制在现实生活中也很常见,例如赌博和某些电子游戏中,随机奖励机制会让人上瘾。
- 这里不在课程范围
问题建模#
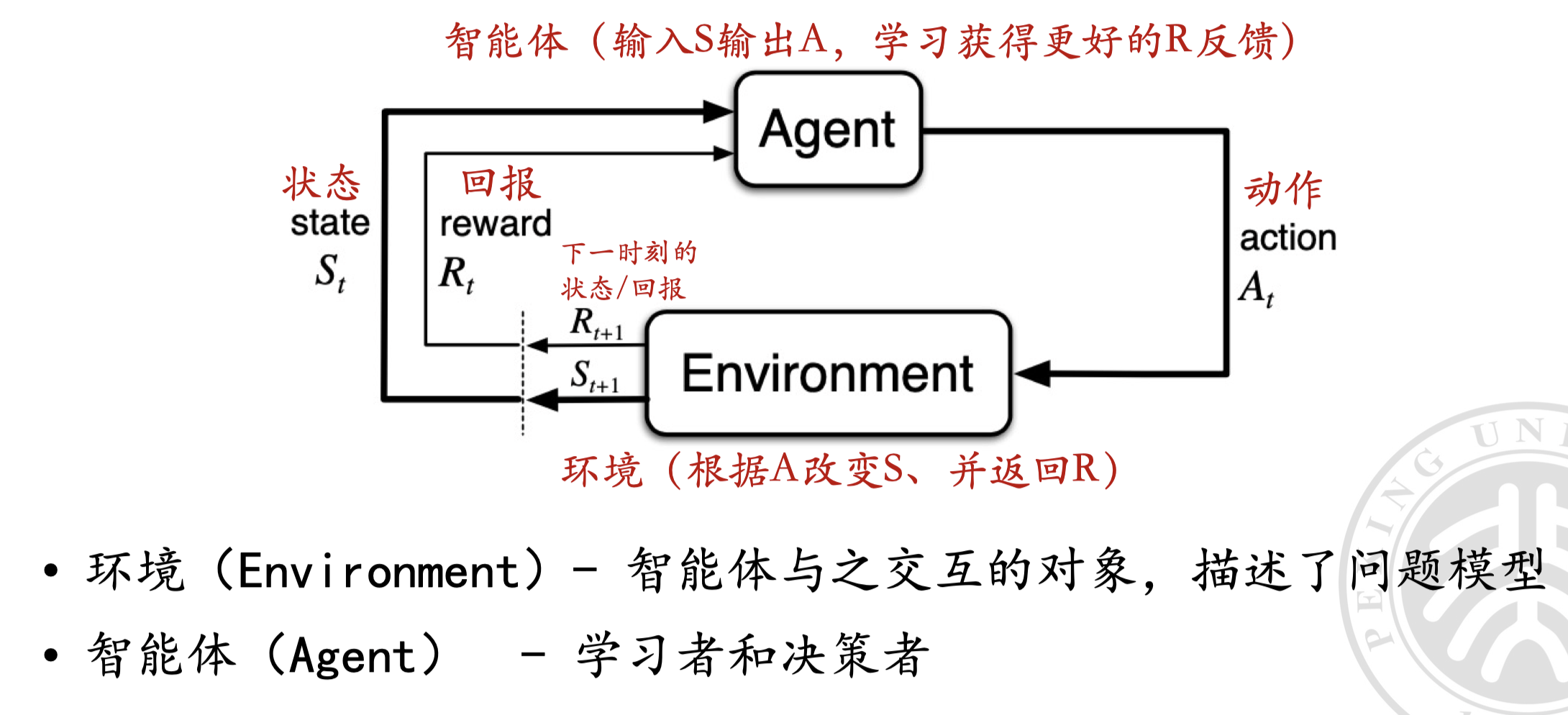
环境(问题模型)#
-
初始状态 (state)
-
当前玩家 (current player (s))
-
动作 (action):智能体在某个状态下的合法动作集合。
-
状态转移 (transition)
用以表示环境,表示在时间 时刻,智能体在状态 下采取动作 后,转移到下一时刻状态 的概率。
衡量一个环境的 复杂程度:某个状态下,智能体采取某个动作后,转移到下一个状态的状态转移模型。可能到达的所有状态构成了 状态空间 (state space)。所有状态下可行动作,构成 动作空间 (action space)。
由此可见,状态转移的不确定性可能来自环境(来自 的数值本身),也可能来自策略(来自 的参数 )。
-
终止状态 (terminate state)
-
奖励 (reward)
,表示智能体在时间 时刻,状态为 并采取动作 后获得的即时奖励。
也即某个状态下,智能体采取某动作后得到的分数。
智能体(问题的解)#
策略 #
- 用以表示智能体的策略,也即在每一个状态 下选择动作 的规则或函数。
- 策略 是状态 到动作 的映射关系,给出了智能体在状态 下如何选择动作 的决策方法。
- 注意:策略 是 全局性 的,任何状态下都要能够给出动作选择。
- 确定性策略 :对于每个状态 ,策略 总是返回一个确定的动作 。
目标(问题的解)#
- 寻找 最优策略 ,使得从初始状态 到终止状态 的累计收益 (gain) 最大
- ,表示智能体从初始状态到终止状态过程中所获得的总奖励
井字棋问题建模#
与先前学习的假设对弈双方都是最聪明(双方都采用最优策略)的 MINIMAX 算法不同,强化学习仅仅假设:
- 敌人采用的是 确定性策略 (给定 下有确定的 ,而不是随机的 ),但是不一定是最优策略。
- 我们可以和敌人进行 多次对弈,从而学习到一个好的对敌策略。
显然,这样的假设更为真实,因为我们能够利用真实情况中,敌人决策的失误来对应的调整我们的策略。
问题建模#
-
初始状态 :空棋盘
-
当前玩家:轮到下子的一方(也可以把对手建模在环境里,每次状态转移返回的状态是 对手已经落子后的状态,这样游戏就是单人游戏,否则就是双人游戏)
-
动作 :落子到当前为空的位置
-
状态转移 :落子之后的棋盘状态(转移到下一个状态)
-
终止状态 :棋盘满或一方获胜,表示游戏结束的状态。
-
奖励 :终止状态,胜者 +1,负者 -1,战平双方均为 0;还没到终止状态的状态(下棋过程中),其奖励为 0
解和目标#
策略 #
使用 状态估值表,每个状态一个入口(表项),记录从该状态出发到终局的胜率。根据状态估值表选择动作。
-
学习策略 :大概率选择估值最高的下一个状态,小概率随机选一个动作(探索)
-
目标策略 :每次选择通往估值最高的下一个状态(贪心)的动作,也即表示在每个状态下选择最优动作的规则。
目标(问题的解)#
最优策略 :使得智能体从初始状态 下到最终的效率 / 胜率最大
训练过程#
第一步:建立状态估值表(值函数表)#
对于井字棋问题,其 状态空间比较小 (一个粗略的估计是不超过 ,每个空可以有 X / O / 空三种状态,但是显然其中还有大量不合法的操作),我们可以用表格存下各个状态的估值。每个状态一个估值,估值表示这个状态到最终的胜率。
我们可以令整个表就是值函数,并在接下来的过程中逐步更新它。
估值表函数初值:(根据游戏规则)
- 三个 X 连成一线的状态,价值为 1,因为我们已经贏了。
- 三个 O 连成一线的状态,价值为 0,因为我们已经输了。
- 其他状态的值都为 0.5,表示有 50% 的概率能贏。
第二步:和对手玩很多次#
目的:让值函数(估值表)更准确
- 利用:大概率贪心选价值最大的地方下
- 探索:偶尔随机地选择以便探索之前没有探索过的地方
利用和探索要平衡。
值函数表 决定了我们的策略,改进值函数表就改进了策略。
第三步:边下边修改状态的值#
其中 是一个小的正的分数,称为步长参数,或者学习率。
- 初值 :只有终局的价值是正确的,中间局面的价值都是估计值 0.5(而这是错的)
- 过程中:状态价值从后面向前传导
- 分析:假设我们一直在一条路径上反复走,每走到终点一次,终局价值至少向上传一步,走多了终将把这个终局的输赢带到最上面的初始节点,于是我们在初始节点就会知道最后的输赢
- 通过学习 可以得到策略最优策略
小结#
-
与上节课 minimax 相比,不再假设对手使用最优策略
-
将对手建模在环境里:每次采取动作后面临的状态(环境返回的更新后的状态)都是对手执行完它的动作后的新状态,从而建模成单智能体问题。
也可以建模成多智能体博弈问题,有一个对手决策模型,轮到对手落子时让对手模型决策
-
用值函数表存储状态估值 / 值函数表
-
通过不断对弈更新值函数表
-
根据值函数表,可以得到贪心选最优动作
问题模型的泛化和分析#
环境(问题模型)#
- 初始状态 (state)
- 当前玩家 (current player (s))
- 动作 (action)
- 状态转移 (transition)
- 终止状态 (terminate state)
- 奖励 (reward)
智能体#
- 策略
- 目标(问题的解) 最大化期望累积收益
环境:状态转移模型 和奖励 #
状态转移 #
不一定是确定性的,可以按 概率 状态转移
:状态转移函数 ,
这里 和 是当前状态和动作, 是下一个状态。返回的是一个概率。 尖括号代表一个元组。
对于任意 ,有 。也即,给定 所有可行动作 下的状态概率之和为 1
奖励 #
也不一定是确定性的,可以是一个 概率 奖励
:奖励函数 ,
这里 和 是当前状态和动作, 是奖励。返回的也是一个概率。
对于任意 , 。也即,给定 和 时所有可能奖励的概率之和为 1
奖励函数对智能体最优策略的影响#
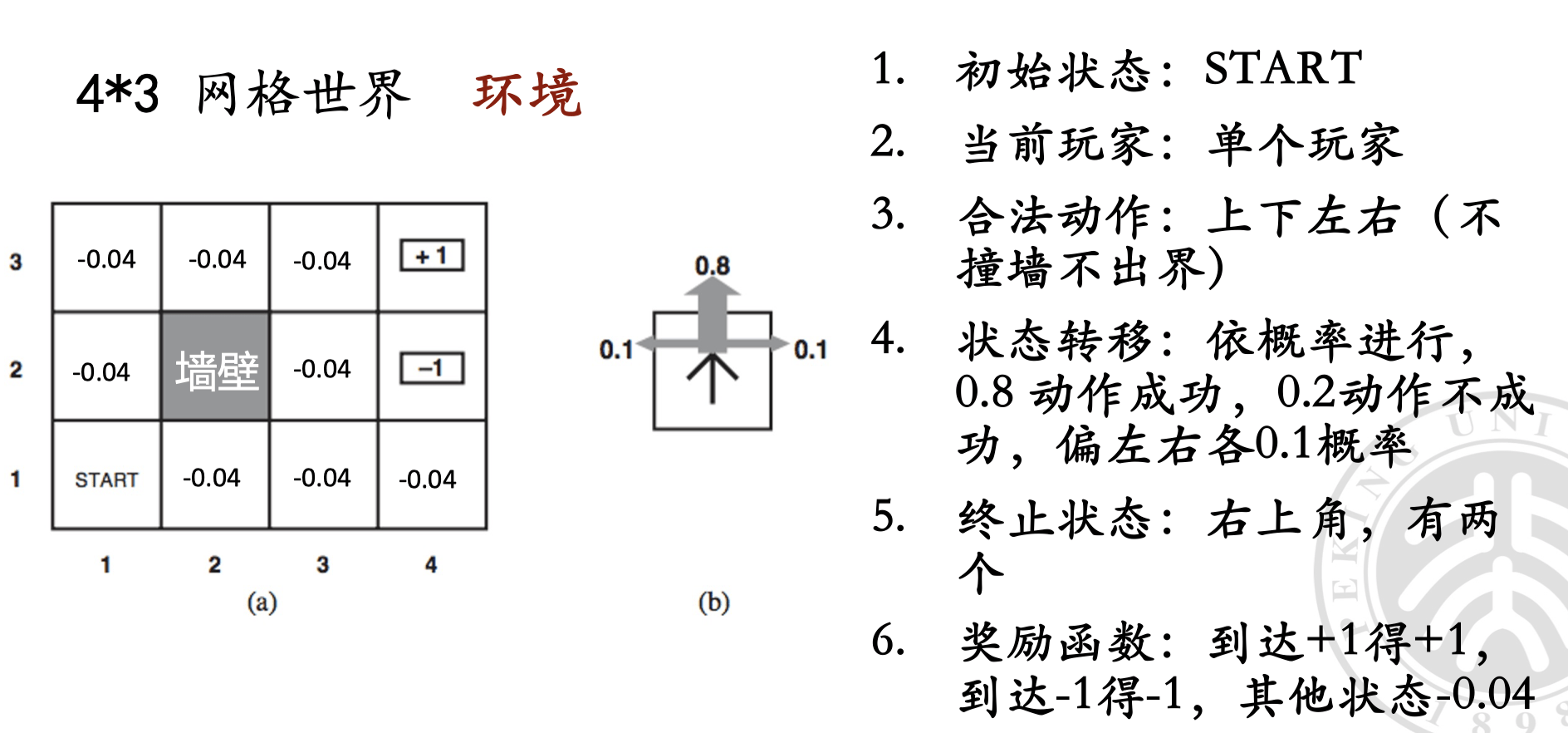
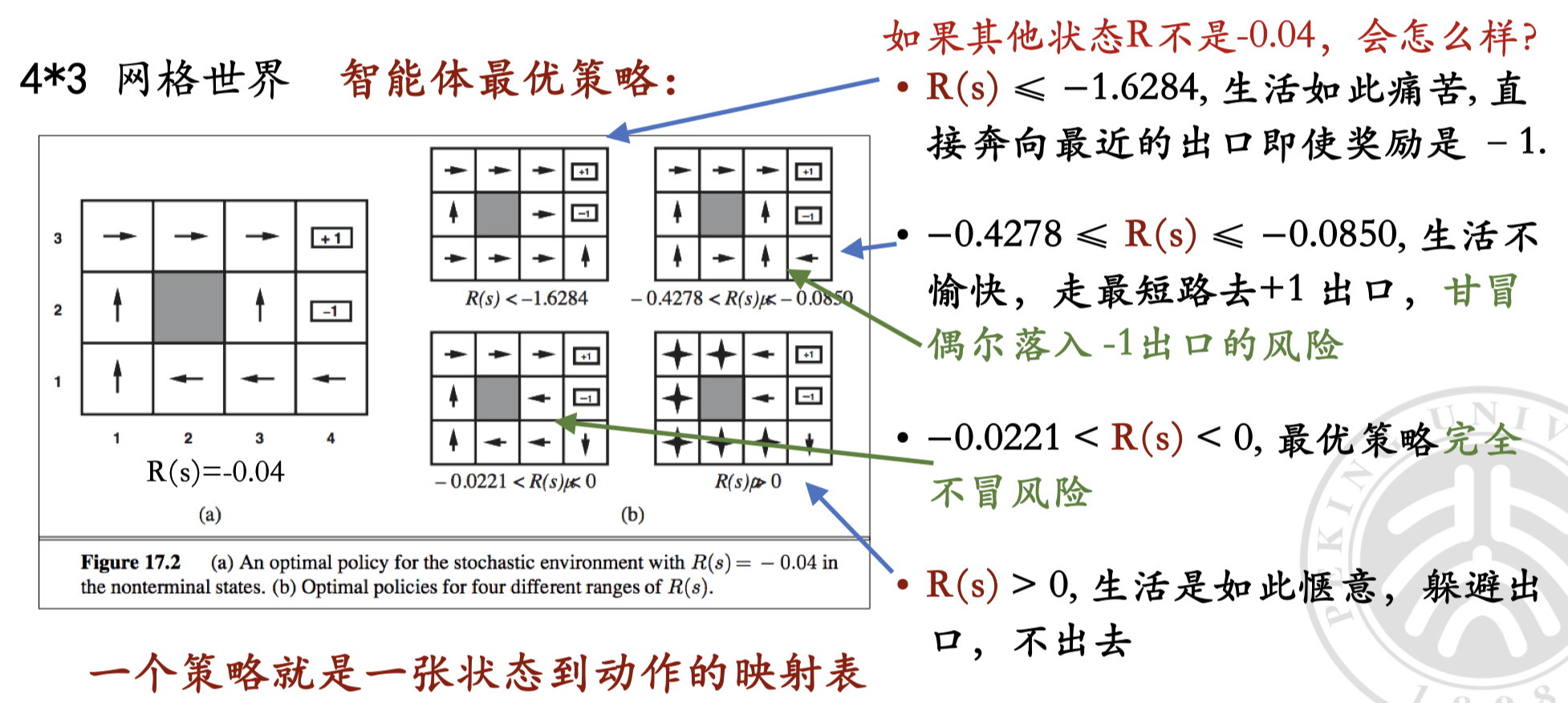
可以看到,选择不同力度的奖励函数,会导致智能体选择完全不同的策略。
智能体:策略 和累积收益 #
策略 #
给出的动作选择可以是确定的,也可以是一个 概率 分布
- :策略函数 ,描述状态 下采取动作 的概率。
- , 是当前状态, 是当前状态下的可选动作。
- 对于任意 ,。
折扣因子 #
,描述未来收益的重要程度,可以使得 按照其指数衰减。
- 若 为 1,则近的收益和远的收益一样重要。
- 若 为 0,则只看下一步的收益(最贪心)。
累积收益 #
- 可以是有限的也 可以是无限的。
- 描述对于某个 状态动作序列的累积收益。
策略的评估和最优策略#
策略 的好坏用 状态价值 来评估:
- 状态价值 表示从状态 出发执行策略 能获得的 累计收益。
- 结束状态(如果有)的价值,总是零。
其中, 是状态空间。
显然从同一个状态 出发, 越大, 越好。使得 最大的 就是 最优策略,记作 。执行 得到的价值,就是最优价值,记作 。
状态价值 和动作价值 #
状态价值 :定义同前。
动作价值 :表示从 出发并做动作 ,之后执行策略 能获得的累计收益。有些时候计算动作价值更方便。
状态价值 和动作价值 的关系#
的状态价值:等价于 下所有可行的动作 的价值的加权和,按照策略选择动作的概率加权。
的动作价值:等价于 下,对所有经动作 可以到达的状态 、获得的奖励 对应的 即时奖励加上折扣后的未来状态价值 的加权和,按照所有可能的 和 的状态转移概率、奖励概率加权。
强化学习的任务#
目标:得到最优 或 ,从而能得到最优策略
计算最优值#
使用各种方法探索出 或
存储最优值#
- 状态多时,查找表保存所有状态的价值不现实(状态太多了,存不下)
- 用 带参数的函数 来保存 和 ( 参数数目小于状态数 )
- 学习过程中我们会调整参数,使之更符合观察到的实际收益。
- 学习效果取决于带参数的近似函数的好坏。
智能体寻找最优策略的路径#
智能体使用策略 (开始可能是随机的)与环境交互,产生 经验 (Experience),然后根据经验,更新迭代,改进策略 ,以期获得更大的 ,如此往复。
寻找最优策略的几种思路#
多臂老虎机问题#
假设有一个玩家面对一排老虎机,每个老虎机有不同的概率发出奖励。玩家的目标是通过多次拉动这些拉杆,最大化累计的奖励。在每一步决策中,玩家需要面对 “探索(Exploration)” 和 “利用(Exploitation)” 之间的权衡:
- 探索(Exploration):尝试不同的拉杆,以发现哪些拉杆的奖励更高。
- 利用(Exploitation):选择已经知道收益较高的拉杆,以最大化即时奖励。
动作价值计算#
- 价值估计:动作 的价值 是选择动作 时的期望奖励(老虎机问题中,状态 是不变的,不考虑 了):
- 经验平均:通过对每个动作的奖励进行平均来估计其价值:
其中, 是指示函数,当且仅当 时为 1,否则为 0。这个式子说的是,对于所有选择动作 的奖励求和,除以选择动作 的次数。
根据大数定理,随着尝试次数的增加,。
增量计算动作价值#
增量更新公式:为了避免存储大量历史数据,使用增量法更新动作价值:
推导:
这个式子将多个历史数据 压缩为均值和尝试次数,来显著减少了存储的数量。
动作价值的一般形式#
其中:
- NewEstimate:新的估计值
- OldEstimate:旧的估计值
- StepSize (n):步长,通常是一个学习率
- Target:新的收益
- Error:误差,即
算法#
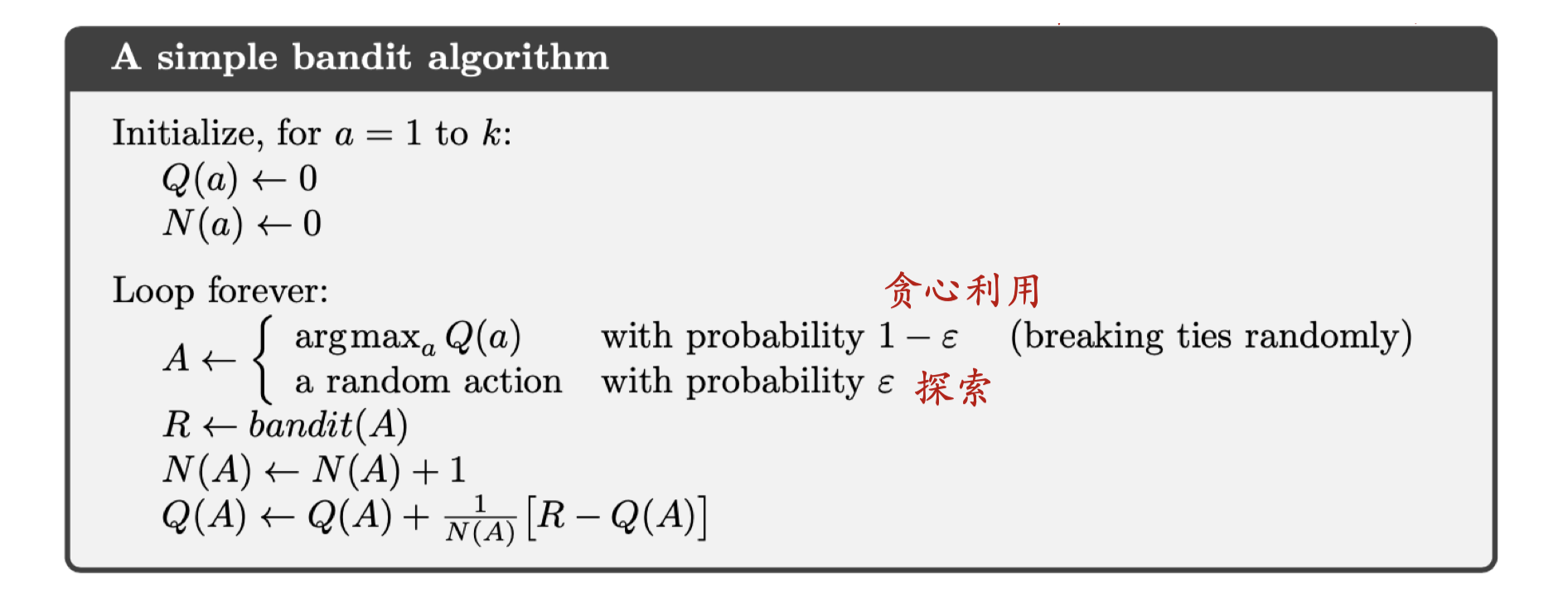
这是一个典型的 贪心算法,用于多臂老虎机问题。
-
初始化
对每个动作 :
- :动作 的价值估计
- :动作 被选择的次数
-
循环
该算法不断循环执行以下步骤:
-
选择动作 :
- 以 的概率选择当前估计价值最高的动作(贪心选择)
- 以 的概率随机选择一个动作(探索)
-
执行动作并获得奖励 :
执行选择的动作 并获得奖励
-
更新选择次数:
更新动作 被选择的次数
-
更新价值估计:
使用步长 更新动作 的价值估计
-
学习率 的讨论#
先前的算法等价于在下面这个公式中迭代时使用 作为学习率:
此时,学习率是非固定的,且随时间增加而衰减。由于其基于求平均推导,所以每次更新时, 中的新旧值(即,最新一次的尝试所获得的奖励 与暗含在 中的先前诸次尝试所获得的奖励)被等同(都是以 的权重)看待。
但倘若我们想要更 偏向新值 信息,那么我们可以调整为固定学习率,从而保证最新值的权重最大:
逐步递归展开:
贪心算法#
简单贪心#
核心思想:总是选择当前估值最高的动作。
贪心#
核心思想:大部分时间选择贪心动作,偶尔随机选择。
改进点:通过引入 随机性 来鼓励探索,避免陷入局部最优。
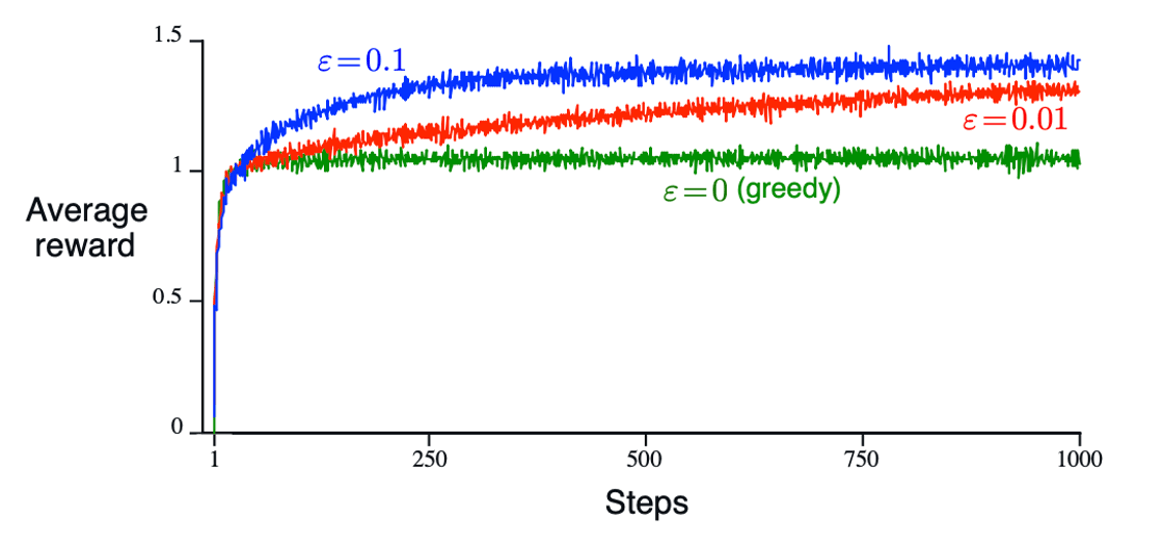
观察可以发现,探索越多( 越大),收益越大,这是因为探索能让算法发现那些可能收益更高的老虎机,而不是过早地陷入局部最优解。
然而,如果 继续增大,那么:
- 收益可能进一步提高:如果当前的探索比例仍不足以找到全局最优解,增加探索比例可能会带来更高的收益。
- 收益可能降低:过多的探索也可能导致收益降低,因为探索次数过多会影响到已经找到的高收益老虎机的利用。
乐观初值贪心#
初值依赖:贪心和 贪心策略依赖初值设定,通常设为 0。
设置初值对训练有如下影响:
- 负面:参数设定依赖:初值需要由人工给出,且设定不当可能影响算法性能。
- 正面:提供先验知识:合理的初值能提供先验经验,帮助算法确定奖励的期望量级。
- 学习效率:初值越准确,算法需要的调整次数越少,学习效率越高。
探索鼓励:设定较高初值(如 ),意味着初始时所有动作的估值都被 高估,由于贪心策略会选择当前估值最高的动作,算法会尝试不同的动作以验证其实际价值。可以鼓励探索(但是是临时性的),避免算法过早收敛到次优解。
对比分析:
- 高初值():期望高,勇于尝试新路径。
- 低初值():探索保守。
进一步展开讲,则是这样的:
- 高初值设定的情况
- 初始时,所有路径的估值都为 。
- 策略选择任意一条路径,如路径 A,发现实际奖励为 ,更新 值:。
- 由于其他路径的估值仍为 ,策略下一次会选择另一条路径,如路径 B,发现实际奖励为 ,更新 值:。
- 策略会继续选择其他未探索的路径直到所有路径的 值被更新到实际奖励。
- 低初值设定的情况
- 初始时,所有路径的估值都为 。
- 策略选择任意一条路径,如路径 A,发现实际奖励为 ,更新 值:。
- 由于其他路径的估值仍为 ,而路径 A 的估值为 ,策略会倾向于继续选择路径 A。
- 策略可能过早地认为路径 A 是最优解,而不去探索其他路径。
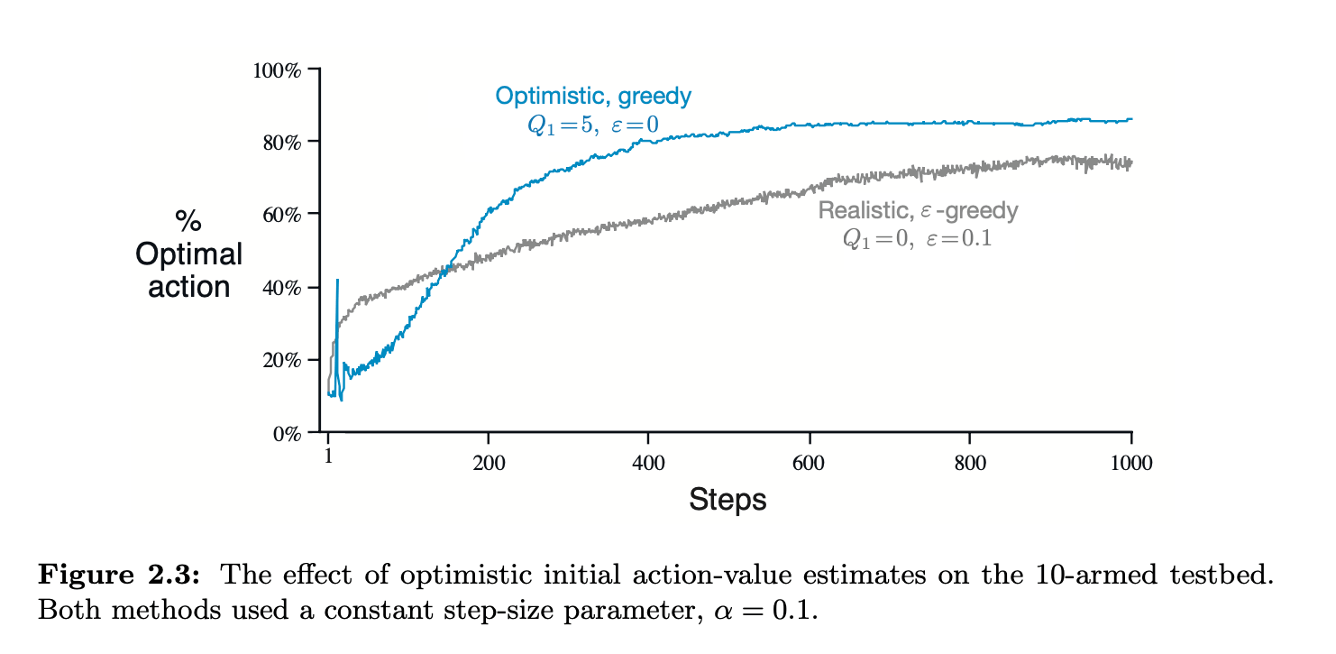
这张图展示了两种不同的 贪心策略在一个多臂老虎机问题(multi-armed bandit problem)中的表现。
-
灰色曲线 (真实初值, 贪心)
- 参数:
- 解释:初始估计值设为 0, 值为 0.1 表示有 10% 的时间选择随机动作,90% 的时间选择当前估计的最佳动作。
- 结果:由于初始估计值较低,算法一开始探索较多,随着时间推移逐渐收敛到一个较好的策略,但表现相对较平稳。
-
蓝色曲线 (乐观初值,简单贪心)
- 参数:
- 解释:初始估计值设为 5(一个较高的值), 值为 0 表示总是选择当前估计的最佳动作(贪心策略)。
- 结果:由于初始估计值较高,算法一开始对动作的估计值较乐观,迅速选择那些看似更优的动作。随着时间推移,算法逐渐调整这些估计值,最终也能收敛到一个较好的策略,但开始时的学习速度较快。
收敛结果:
- 灰色曲线( 贪心)由于一直在探索,收敛更慢,最终收敛到了一个局部最优解。
- 蓝色曲线(乐观初值),加速了初期的学习过程,但是找到了一个较好的路径后失去了探索能力,依据此路径,快速收敛,最终收敛到了一个相较灰色曲线的更优解。
适用性:
-
固定问题:问题环境和奖励机制在整个学习过程中不发生变化,也即 和 固定,乐观初值有效
利用 高初值 鼓励探索,迅速收敛到最优解。
-
非固定问题:问题环境或奖励机制会随时间变化,也即 和 随时间 变化,乐观初值探索 不适用, 贪心更适用。
通过 随机选择 保持探索,适应环境变化。
Upper Confidence Bound (UCB)#
核心思想:
- 因为不确定性总是存在,所以需要探索。
- 贪心算法只能选择当前看似最好的动作,但其他动作可能更好。
- UCB 方法将 “当前估值” 和 “新鲜程度” 加权和。
其中:
- 是动作 在时间 的估值
- 是动作 在时间 前被选择的次数
- 是控制探索程度的常数
如果 ,中括号内的值会很大,此时,对应的动作 被认为是一个取值最大的动作,即最有可能被选择(也即 UCB 算法会强制选择对应的动作 ),这确保了每个动作至少被尝试一次,这样可以避免贪心策略带来的局限性,从而实现更全面的探索。
Gradient Bandit Algorithms 梯度下降#
核心思想:
- 贪心大概率选最好的动作,其他动作 等同对待,其实也可以给每个动作一个对应的选择概率
- 通过给每个动作 一个 数值优先度 ,来影响选择概率。
- 优先度越大,动作被选中的概率越大。
据此,我们给出如下设计:
-
采用 Softmax 函数归一化,使所有可行动作的概率和为 1:
-
初始时,所有动作的倾向性相同()
-
在每一步,按概率选择了动作 后得到及时奖励 ,根据奖励 的大小,修改所有动作的优先度:
当 时,我们认为此动作的奖励优于奖励均值(参照值),所以提高他的优先级,降低其他动作的优先级
否则,降低此动作的优先级,提高其他动作的优先级。
除了设定为奖励均值外,也可以人为固定,如果能够 合理的划分出好的动作和坏的动作,那就是成功的:

算法比较#
-
贪心算法有一小部分时间随机选:随机的探索 (是持久性的,因为在全过程一直在以 的概率探索非最优的动作)
-
UCB 偏向尝试次数小的动作:根据统计的探索 (是否探索依赖于已经探索过的次数)
-
梯度下降法不是估计动作的价值,而是动作的优先顺序选动作。其实也有探索,因为动作采用 Softmax, 有概率 (不过如果选取规则就是直接选择最大概率的贪心,那就没有探索了)
-
简单的设置 乐观初值 可以使得贪心算法也具有相当的 探索性 (是临时性的,只有在早期有效)