问题模型#
对抗性#
在零和游戏中,总收益为零,一方的收益必然是另一方的损失。常见于竞争性环境,如内卷现象。
非零和游戏中,总收益不为零,各方通过最大化自身利益,有时还需要合作。损人不一定利己,可以多方共同从第三方获取收益。
人数分类#
- 单人游戏:仅一个参与者
- 双人游戏:两个参与者
- 多人游戏:三个及以上参与者
随机性#
- 确定性游戏:动作引发的后果是确定的
- 非确定性游戏:动作引发的后果是不确定的
状态可见性#
- 完全信息游戏:所有信息对所有玩家都是已知的
- 非完全信息游戏:对玩家存在未知信息
同步性#
- 同步游戏:所有玩家同时进行决策
- 异步游戏:玩家依次进行决策
环境的可变性#
- 环境信息不变游戏:游戏环境信息保持不变
- 环境信息变化游戏:游戏环境信息会发生变化
双人零和游戏#
游戏定义#
一个双人零和游戏可以定义为一个 搜索 问题,包含以下元素:
S0:初始状态,描述游戏开始时的状态。PLAYER(s):在某个局面下,轮到哪个玩家选择动作。ACTIONS(s):返回在某个状态下的合法动作集合。RESULT(s,a):状态转移模型,一个动作执行后到达哪个状态。TERMINAL-TEST(s):游戏结束返回true,否则返回false。游戏结束时的状态称为终止状态。UTILITY(s, p):效用函数(目标函数或者支付函数),表示游戏结束时玩家 的得分。零和游戏中,所有玩家得分的和为零。
搜索树复杂性#
游戏的难点在于 搜索树可能非常大。
- 国际象棋
- 平均每步有 35 个选择。
- 每个选手需要走 50 步,两人总共 100 步。
- 搜索树节点数: 或 个节点。
- 围棋
- 平均每步有 250 个选择。
- 每个选手需要走 150 步,两人总共 300 步。
- 搜索树节点数: 或 个节点。
过往的搜索算法无法遍历和存储如此大的搜索树,这使得问题变得非常困难。
然而,即使无法计算最优动作,游戏依然需要做出某种决策。为此,我们需要进一步优化搜索过程。
极大极小搜索 MINIMAX#
MINIMAX 方法遍历所有可能发生的局面,找出最佳方案。其假设 对手和自己一样聪明,对手总是 最小化 你的收益,而你则 最大化 自己的收益。你采取的方案是 相对稳妥 的方案。
这就是极大极小(Minimax)搜索的雏形,其基本思路如下:
- 状态:局面
- 动作:在该局面下,该走棋的玩家的合法动作
- 状态转移:一步过后的所有可能局面
- 极大极小搜索:在决策树上的游历,假设敌人和自己一样聪明
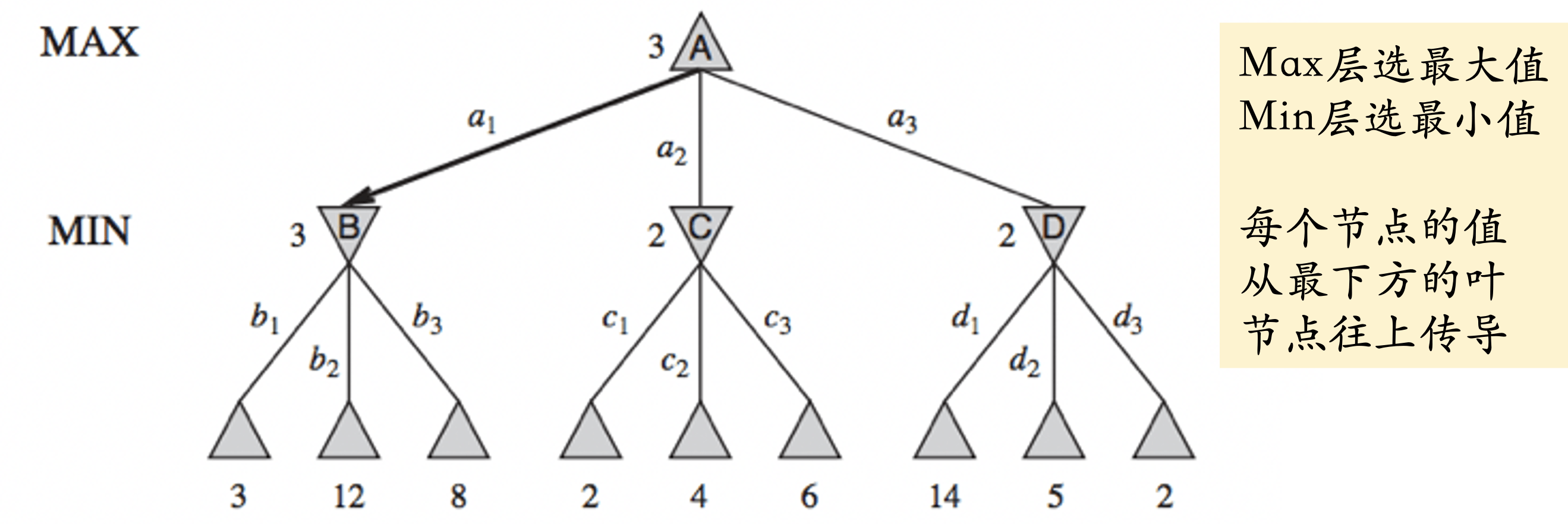
这张图中,各个层的选值都是选择下面的分支的,然后传递到上面的分支
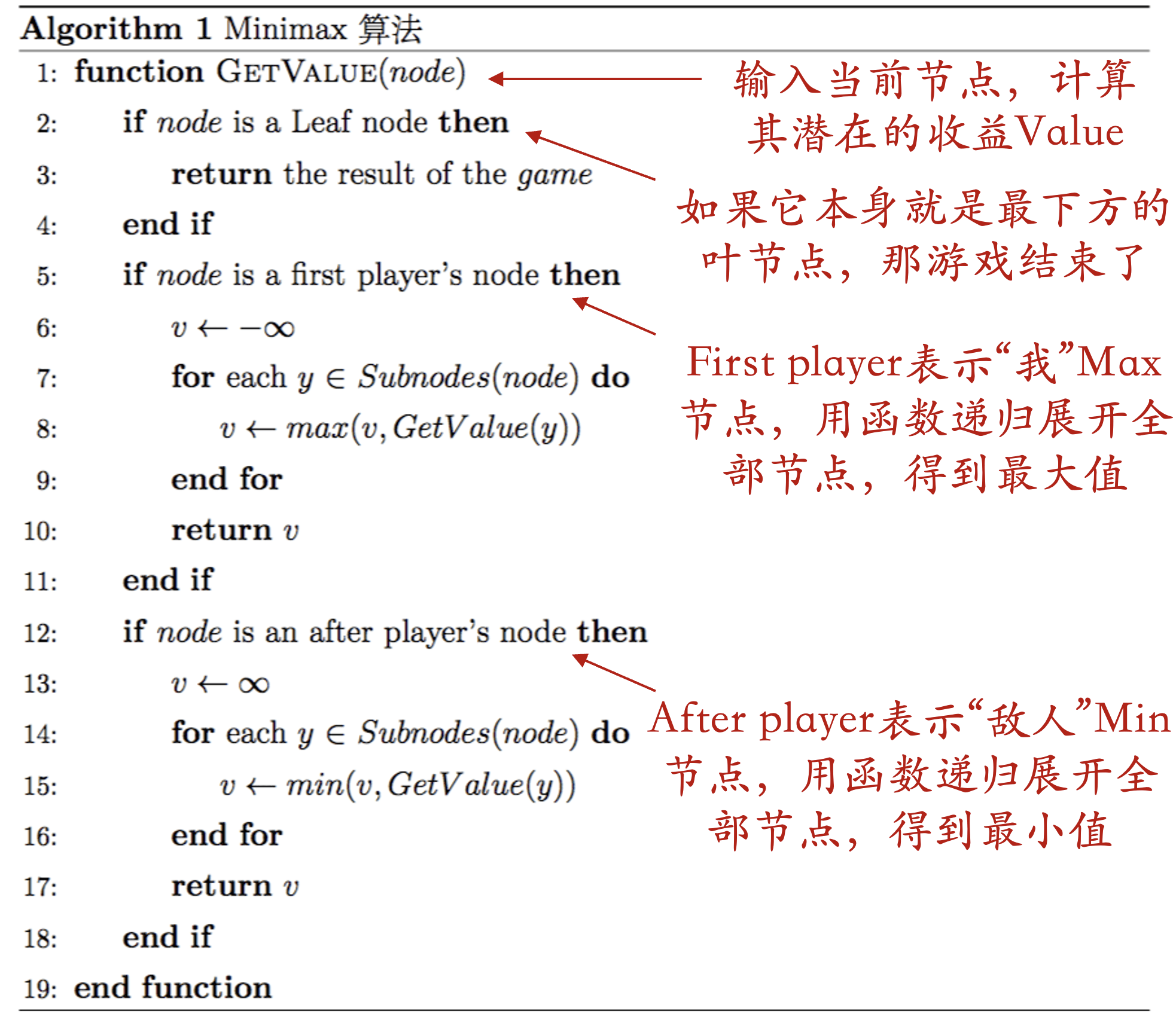
伪代码#
可以通过合并符号来简化伪代码,得到一个类似于如下的序列:
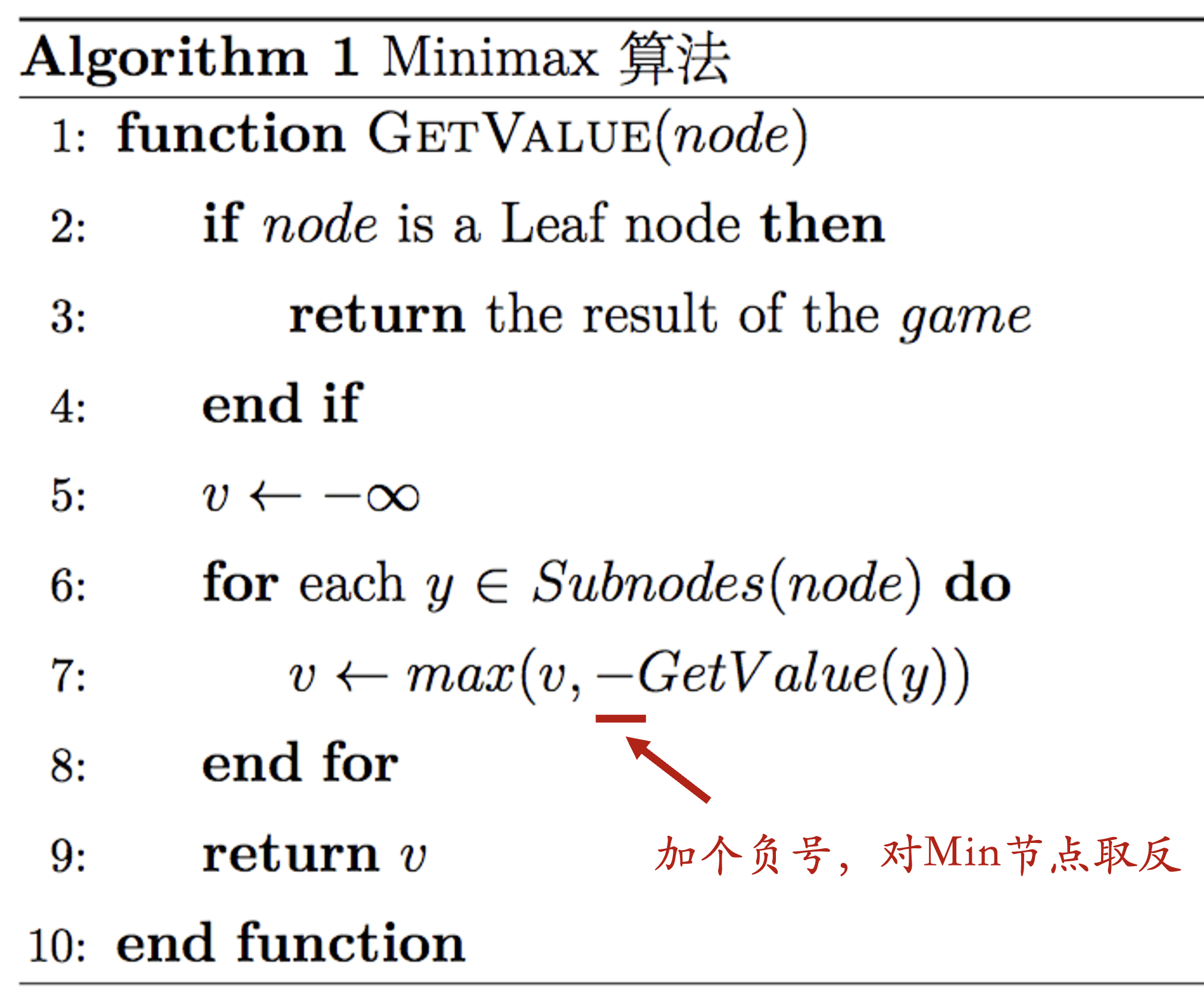
其中核心一句在 v ← max(v, -GetValue(y)),这句 -GetValue(y) 中的负号会不断地颠倒 max 操作的实际上取方向,从而使得一个一直上取的 GetValue 函数等价于原先的交替上下取的版本。
若依据此写法,则实际上并没显性的 Max 节点和 Min 节点的区分了。而是仅仅根据从根节点迭代到当前节点,一共乘了几次负号来判断(不包含当前节点的 v ← max(v, -GetValue(y)) 中的负号):
- 如果乘的是偶数次负号,则是 Max 节点
- 如果乘的是奇数次负号,则是 Min 节点
极大极小搜索算法采用 深度优先搜索算法 (递归调用 GetValue 函数直至抵达代表终止状态的叶节点,意味着深度优先)。假设搜索树的深度是 ,每个结点有 个合法操作,则极大极小算法的时间复杂度是 。空间复杂度如下:
- 展开所有儿子结点:
- 只展开一个儿子:
这意味着在真实的复杂对弈中,此模型并不实用。
记忆与估值#
1956 年,IBM 的 Arthur Samuel 制作了西洋跳棋 AI,能够轻松打败新手玩家。该 AI 基于极大极小搜索,并增加了 学习能力,包括:
- 死记硬背学习:直接使用之前极大极小搜索的计算结果对每步进行估值。
- 一般化学习:通过 参数化 的估值函数,不断调整参数以缩小计算 估值 和实际评价的差距。
这种学习方法带来了 AI 水平的突破性进展(不同于类似全局估值表这样的字典,一般化学习实际上使用了更少的参数来表示估值函数,大大提高了同硬件水平下的性能)。深蓝和 AlphaGo 都是上述第二种算法的演化版本,利用参数化模型预测真实估值。
这里的估值,可以理解为先前神经网络中,你训练得到的推理结果。
缩小估值与实际评价的差距,就是类似于之前不断反向传播从而减小损失函数,提高神经网络性能。
Alpha-Beta 剪枝算法#
Alpha-Beta 剪枝算法在搜索时返回与极大极小搜索相同的结果,但 忽略 了搜索树上那些不会影响最终结果的部分。可以认为,Alpha-Beta 剪枝算法是极大极小搜索算法的简化版本。
剪枝:是指在搜索树中去掉一些分支,以减少计算量。这里的剪枝是 无损失 的,不会影响最终结果。
伪代码#
- 初始条件:最大下界 设置为 ,最小上界 设置为 。
- 这个函数是搜索的入口。它接受当前的状态节点
state,并调用MAX-VALUE函数开始搜索 - 由于我们要最大化自己的效益函数,所以通过
MAX-VALUE函数来遍历当前节点的子节点(以及更多的后继节点),MAX-VALUE函数返回的是一个价值 ,我们根据这个 找到对应的动作action。
-
传入参数:当前状态
state,当前状态的最大下界 ,当前状态的最小上界 。 -
初始条件:如果当前状态是终止状态(
TERMINAL-TEST(state)),直接返回状态的效用值UTILITY(state)。 -
初始化:将 初始化为 ,因为我们现在是在 Max 层,所以我们的目标是不断的 最大化下界 以提高我们的效用函数的输出,这对应了后续的更新 的操作。
-
遍历动作:对每个可能的动作
a,计算该动作结果状态的价值。这个结果状态通过MIN-VALUE函数评估。注意,与MAX-VALUE函数相对,MIN-VALUE函数代表对手,其目标是不断地 最小化上界 以削弱我们效益函数的输出,MIN-VALUE返回的是下一层能拿到的 最小上界。在这个循环遍历的过程中,我们会不断的更新 ,它指示本层可能拿到的 最大值。 -
剪枝条件:如果当前状态可能拿到的最大值 的值已经累进到大于或等于传入的当前最小上界 ,则可以停止继续评估剩下的动作,直接返回 。这是因为当前层是一个
MAX-VALUE层,我们返回的状态价值必然大于等于 ,当前层的上一层(若有)又是一个MIN-VALUE层,它不可能在已知有更小可能的 下选择当前节点的返回值。所以本节点于更新上层状态节点的估值完全无益了,提前返回可以实现剪枝,避免多余的计算。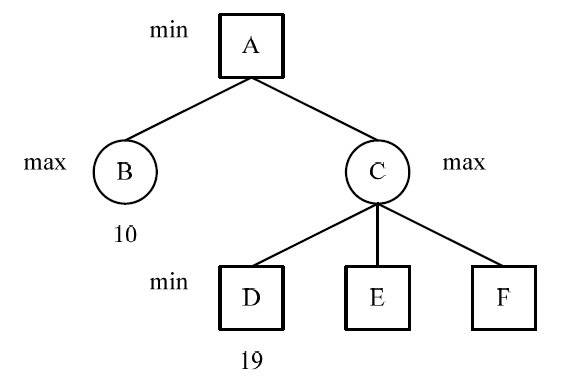
极小值冗余如图所示,这是一颗博弈树的某一部分,节点 B 的值为 10(),节点 D 的值为 19,这里,C 节点为取最大值 max 节点。
因此,C 的值将大于等于 19();
节点 A 为取极小值的 min 节点(这就是 推知剪枝的根本原因),
因此 A 的值只能取 B 的值 10,也就是说不再需要求节点 C 的子节点 E 和 F 的值就可以得出节点 A 的值。
这样将节点 D 的后继兄弟节点减去称为 Beta 剪枝。1
-
更新 :如果上述剪枝条件没有满足,那么意味着我们找到了一个更大的 ,我们更新当前的最大下界 ,即 。
要注意在整个过程中 的作用域, 一直不变, 在动作迭代间改变,方便
Min-Value函数用于剪枝。 -
最后,返回 ,它代表本节点能够获得的最大效益。
这里建议参照 OI Wiki / Alpha-Beta 剪枝 ↗ 的具体图例理解。
-
分析类似上面
MAX-VALUE的情形。 -
剪枝条件:
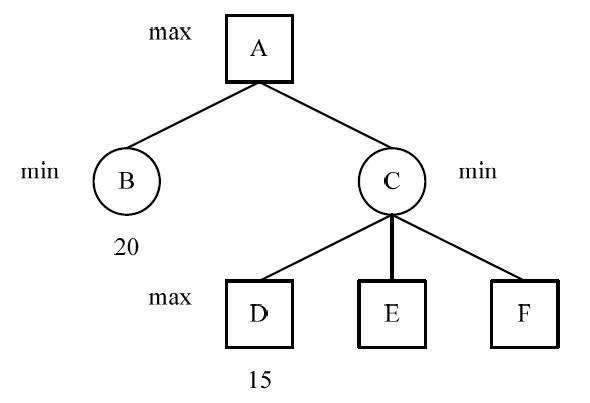
极大值冗余如图所示,这也是一颗博弈树的某一部分,节点下的数据为该节点的值,节点 B 的值为 20(),节点 D 的值为 15,这里,C 为取极小值的 min 节点。
因此节点 C 的值将小于等于 15 ();
节点 A 为取最大值 max 的节点(这就是 推知剪枝的根本原因),因此 A 只可能取到 B 的值,也是就说不再需要搜索 C 的其他子节点 E 和 F 的值就可以得出节点 A 的值。
这样将节点 D 的后继兄弟节点减去称为 Alpha 剪枝。1
剪枝条件总结 1#
- 当一个 Min 节点的 值 ≤ 任何一个祖先节点的最大上界 时 ,剪掉该节点及其所有子节点
- 当一个 Max 节点的 值 ≥ 任何一个祖先节点的最小上界 时 ,剪掉该节点及其所有子节点
整体实战可以参考 7forz / 一图流解释 Alpha-Beta 剪枝(Alpha-Beta Pruning) ↗ 理解,这个链接里的题也比较类似于往年题里的,强烈建议阅读。
二合一伪代码#
同样是仿照先前的思路,我们依旧是通过不断的变号、颠倒上下界来完成合并。
注意,在这个过程中 实际上不会改变。这对应了无论是在 Max-Value 还是在 Min-Value 中,实际上都有一侧的界没有更新:
- 在
Max-Value中,我们不断的更新最大下界 ,而最小上界 一直是不变的。 - 在
Min-Value中,我们不断的更新最小上界 ,而最大下界 一直是不变的。
复杂度分析#
最好情况#
-
节点展开情况:
- 第一层:每个节点生出 个儿子
- 第二层:每个节点生出 1 个儿子,其他节点全都在此节点获得到界值后被剪枝
- 第三层:每个节点生出 个儿子,这对应上一层中第 1 个儿子获得界值的过程
- 依次类推,一层 、一层 1、一层 …
-
层数关系:假设树的最大深度为 ,则有 的层数为
在最好的情况下,我们只需检查 个节点即可找到最优解。这比 Minimax 算法的 复杂度要好得多。具体来说:
- 每个状态平均有 个选择,而不是 个选择
- 从另一个角度看,Alpha-Beta 算法可以在相同时间内比 Minimax 算法搜索更深一倍的节点
最差情况#
在最差情况下,Alpha-beta 剪枝算法并不能减少任何节点的评估数量。这种情况发生在节点按照最差顺序进行搜索时,即每次都先访问最不优的节点,导致完全没有任何剪枝发生。其时间复杂度与 Minimax 算法相同,同为:
平均情况#
在平均情况下,Alpha-beta 剪枝算法的时间复杂度介于最优情况和最差情况之间。一般情况下,平均时间复杂度近似为
不完美的实时决策#
- 传统方法:Minimax 或 Alpha-beta 算法都需要直接搜索到终局状态(叶子节点),计算准确的胜负,这对于搜索树很深的情况并不好。
- 改进方法:用启发式函数
EVAL在非叶子节点 进行估值,从而提前截断搜索。也即,在没有搜索到终局状态时,若满足一定条件(Cutoff Test),提前使用EVAL给出一个返回值,从而避免一直要(深度)搜索到叶子节点(即满足Terminal Test)才能使用真实效用函数UTILITY,加快计算效率。
状态估值函数的特性#
- 终局状态估值函数和真实得分的一致性:在游戏的终局状态,状态估值函数必须给出与真实得分一致的值。这意味着当游戏结束时,估值函数应该准确反映当前局面的得分情况。也即,此时必须有
EVAL == UTILITY - 计算效率:估值函数的计算不能花费太多时间。
- 强相关性:非终局条件下,估值函数在非终局状态下要与最终胜负有很 强的正相关性。
状态估值函数的设计#
一个很自然的想法是,设计各种特征,并对特征进行线性加权,从而获得一个状态估值函数:
但是,采用线性加权函数作为状态估值函数的效果并不好,因为他假设每个特征的贡献是 独立 的,以及是可以线性估值的,但是在真实情况中,这都是不一定的:
- 不同的特征之间可能有复杂的相互影响,导致非独立性
- 估值函数可能不是平滑线性变化的
而且,手工设计特征和特征权重,实际上是基于人为提供的 先验经验 的,且不说其是否准确可用,对于一些游戏,甚至不一定有。
因而,我们可以采用先前的机器学习方法来学到一个的 非线性 的复杂估值函数,从而拟合真实情况。
状态估值函数的应用#
当我们有了状态估值函数后,我们就可以用 cutoff test 替代 terminal test,提前返回估值函数 eval 的值来加快搜索。
// before
if TERMINAL-TEST(state) then return UTILITY(state)
// after
if CUTOFF-TEST(state, depth) then return EVAL(state)- 在搜索深度达到搜索深度限制 时,调用
eval函数返回估值。 - 如果不好确定深度,可以使用 迭代加深 方法。当深度限制到了,算法返回搜索到的最深一层所返回的值。若深度限制到了但没找到终局,就让深度限制大一点,继续搜索。
- 估值函数还可以用来对子结点排序,好的节点排在前面,可以提升 Alpha-Beta 剪枝的效率。
小结#
实时决策:指在规定时间内给出决策结果。例如下棋时,需要在走子时限内做出决策。
不完美的实施决策:问题规模很大的时候,受限于时间限制,我们 无法搜索到终局,也就无从准确的胜负情况,因此决策是不完美的。
解决方法:
- 使用 启发式状态估值函数 来估计当前状态的价值
- 限定搜索深度,到了一定深度就截断搜索
- 难以确定搜索深度,则可以采用迭代加深的方法。在时间允许范围内逐步加深搜索深度,直到到达时限
状态估值函数:
- 可以采用经验定义,或者机器学习的方法
- 搜到终局的时候必须采用真的得分,否则返回估计值
- 状态估值函数影响决策好坏
- 可用于 子节点排序,提升 Alpha-Beta 剪枝的效率
蒙特卡洛树搜索#
蒙特卡洛方法(Monte Carlo method)是一种 统计模拟 方法,通过大量采样来获得概率估计。这种方法依赖于概率论中的大数定律,即大量重复实验的平均结果将接近于某个确定值。其 不是 一个严格意义上的算法。
大数定律:
特点:统计方法,计算能力越强,性能越好。
优点:即使在没有领域知识的情况下也能使用。因为它绕过了人为设定好的状态估值函数这一困难很大的步骤,而是基于大量的随机采样来估计状态的价值。
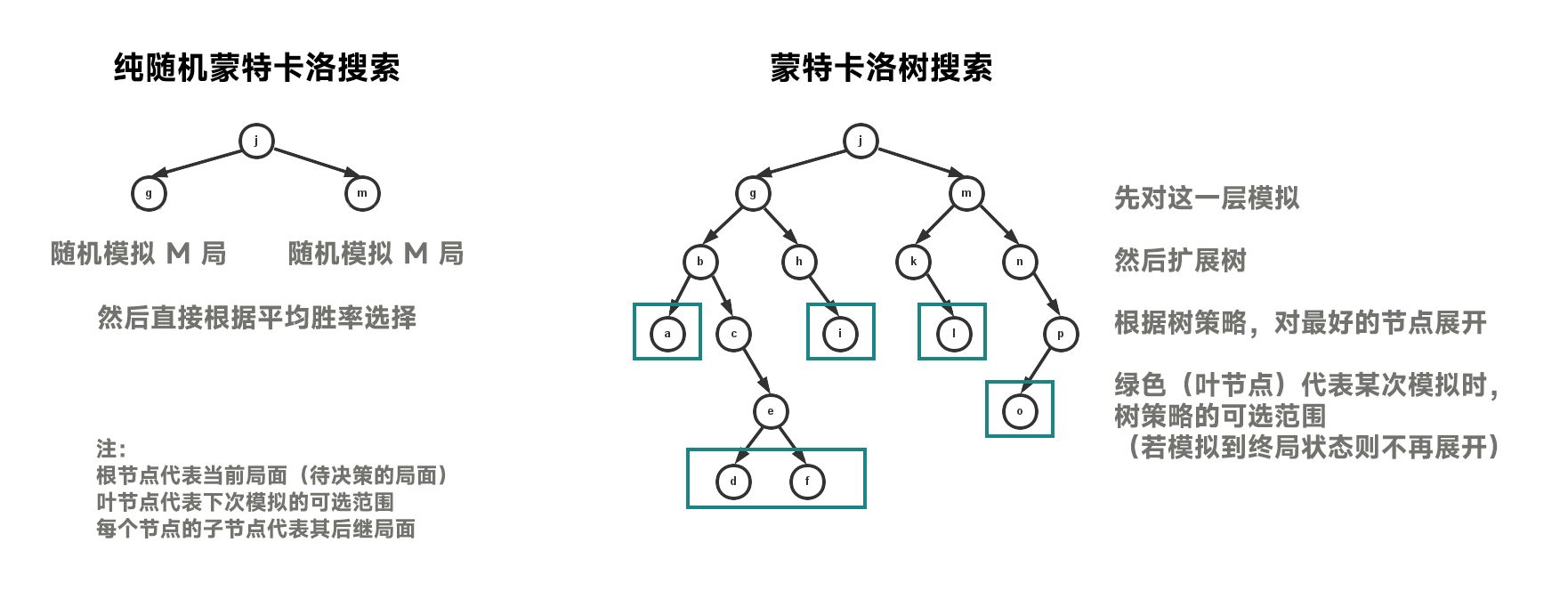
纯随机蒙特卡洛方法#
先前的决策方法依赖于状态估值函数的设计,但是很难设计一个好的状态估值函数。
所以,我们可以直接进行对弈模拟(双方策略都是随机下),即在决策空间中随机采样,根据采样的结果来评估状态价值(如计算平均胜率),然后据此来排序子节点。
纯随机蒙特卡洛方法正是采用了上述模拟思想,运用 随机搜索 策略,通过大量随机模拟来估计当前状态的价值。
通过这种方式,纯随机蒙特卡洛方法能够有效地在复杂搜索空间中找到较优解,而无需人为设计的状态估值函数。
算法过程#
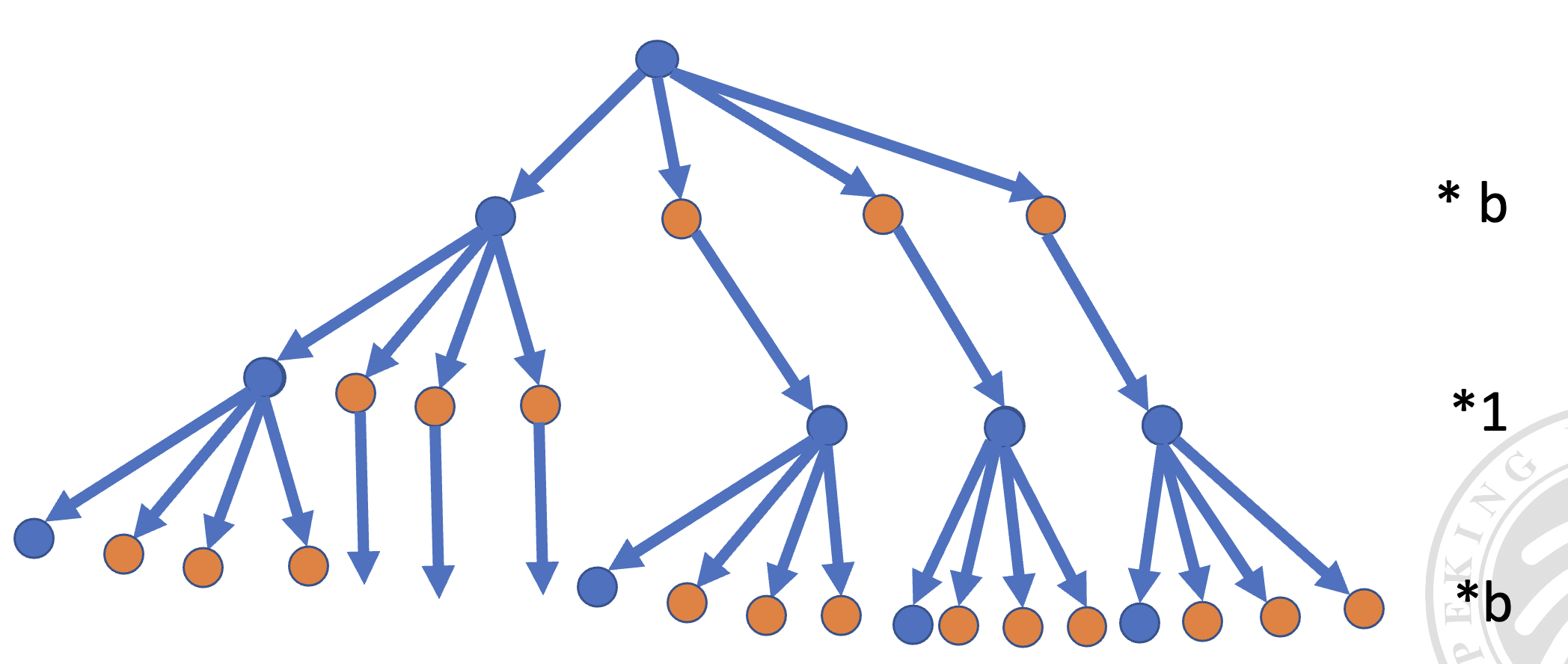
- 节点选择:在当前节点下,存在 N 个可能的后继儿子节点。
- 估值计算:
- 对每个儿子节点进行 M 次随机搜索。
- 每次搜索中,敌我双方均采用随机动作,直至终局。
- 通过 M 次搜索的结果,计算每个儿子节点的平均胜率。
- 决策:选择胜率最高的儿子节点作为下一步的行动。
缺点#
- 内存利用不足:该方法未充分利用内存资源。
- 准确性问题:除非 M(搜索次数)非常大,否则估值可能不够准确。
- 重复搜索:该方法可能导致大量重复状态的搜索,影响效率。
蒙特卡洛树搜索#
蒙特卡洛树搜索(Monte Carlo Tree Search,MCTS)也是一种通过在决策空间中(模拟)随机采样,并根据结果 构建搜索树 来在给定域中寻找最优决策的方法。
与前文纯随机的蒙特卡洛算法不同,MCTS 结合了 树搜索,能够 记住之前的模拟结果,并利用这些信息来指导未来的搜索,从而避免无效的重复搜索并专注于更有前景的分支。
换句话说,他不会在一条分支下无限下探,在对一条分支的搜索中,他会不断地更新这条分支的价值,一旦其他分支的价值更高,它会转向搜索其他分支。
而纯随机的蒙特卡洛算法直接就没有搜索树的概念,它就是直接暴力模拟所有可选动作,然后选择胜率最好的那个。
算法过程#
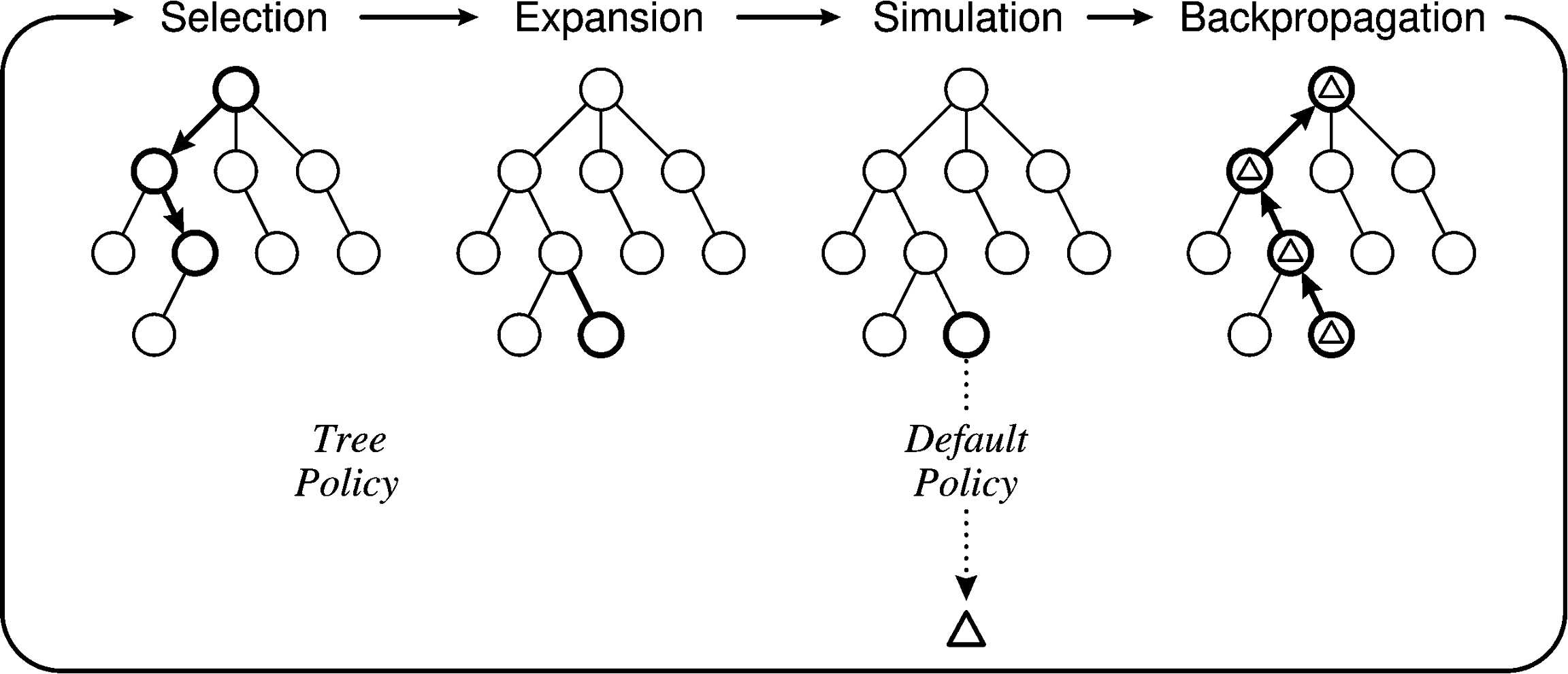
- 选择(Selection):从 根节点 开始,使用子节点 树策略 递归向下选择节点,直到找到一个非终止且未访问的子节点。
- 扩张(Expansion):根据可选择的动作,添加一个或多个子节点来展开树。
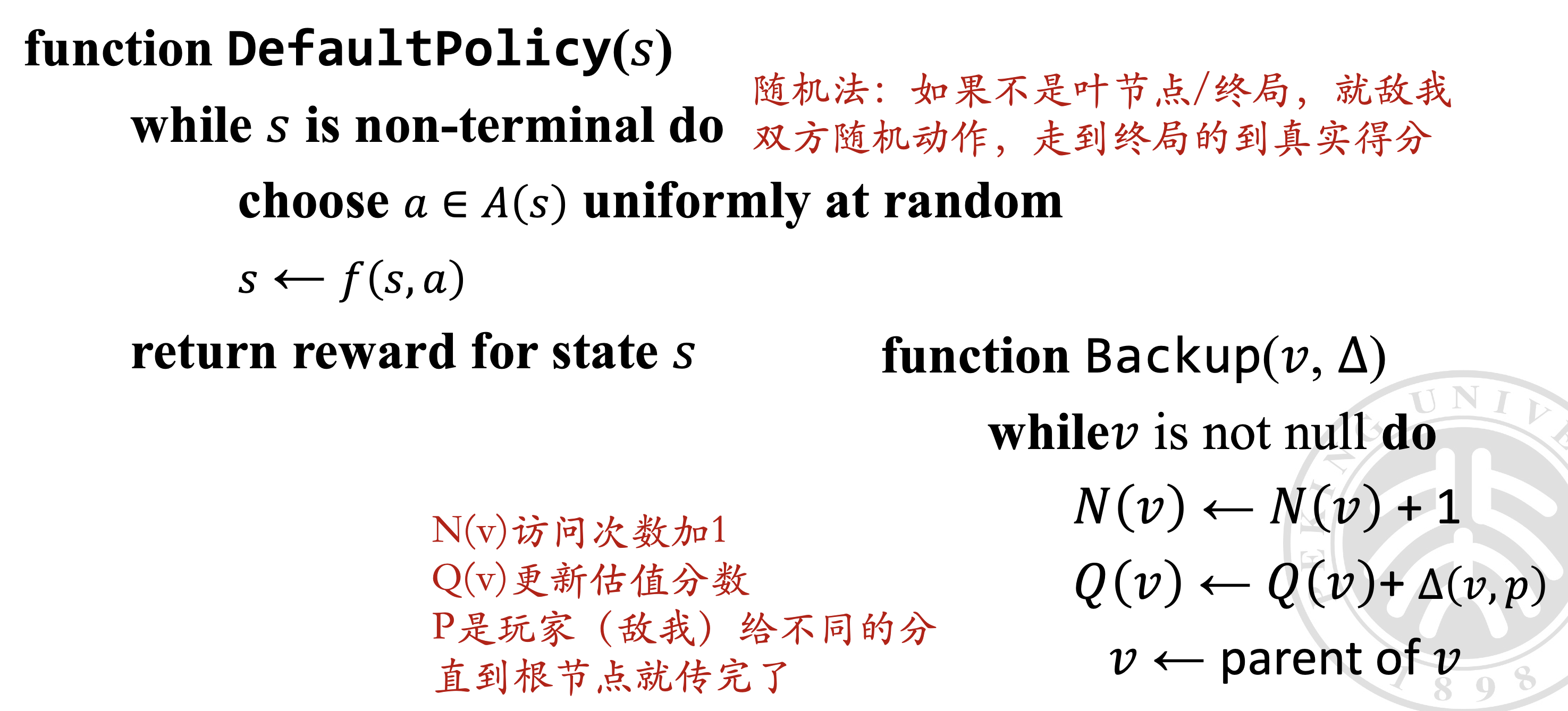
- 模拟(Simulation):从被选择的节点开始,使用 默认策略 进行动作选择和状态转换,直到达到终止状态。蒙特卡洛搜索树会根据模拟结果进行更新。
- 反向传播(Backup):更新与被选择节点及其祖先节点相关的统计信息。
树策略(Tree Policy)与默认策略(Default Policy)#
树策略 是蒙特卡洛树搜索(MCTS)中用于 选择下一个要模拟的节点 的策略,其核心在于平衡探索(Exploration)和利用(Exploitation):
- 探索:旨在检查尚未充分了解的区域,以发现新的可能性。
- 利用:侧重于使用已知且预期效果最佳的区域,以优化当前的选择。
这种平衡确保了搜索过程既能发现新的策略,又能有效利用已知信息。
树策略不一定是完全只看模拟胜率的贪心!
树策略:负责在蒙特卡洛树搜索(MCTS)的 选择和扩张 阶段,从现有的搜索树中选择节点并创建新的叶节点。这一过程是基于当前树的状态和可能的未来收益来决定路径的。
默认策略:在 模拟阶段 发挥作用,它从一个非终止状态开始,通过不断模拟游戏直至结束,从而得到一个价值评估。这个评估帮助 MCTS 确定哪些路径可能更有价值。默认策略是对原先状态估值函数的替换。
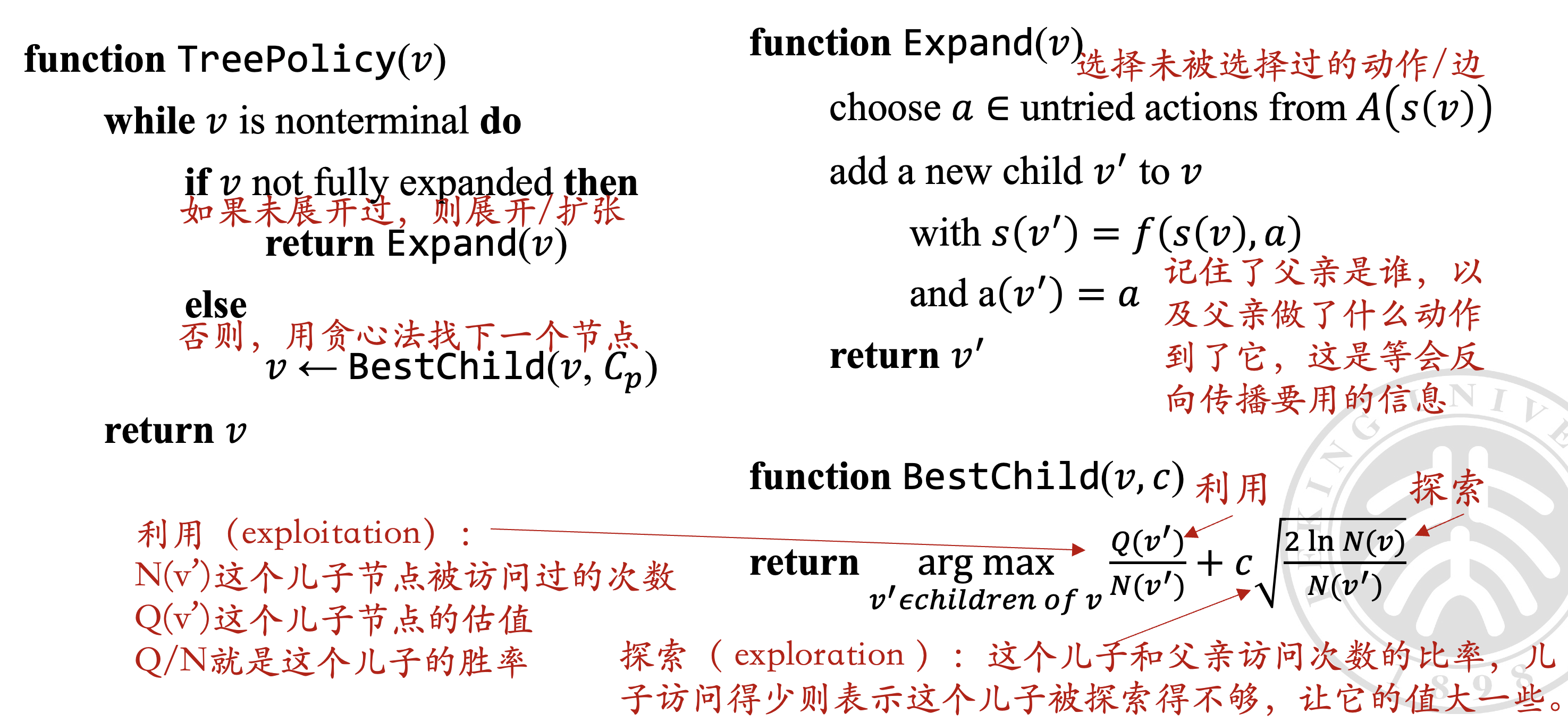
UCT 算法#
UCT(Upper Confidence Bound for Trees)算法是一种蒙特卡洛树搜索(MCTS)的变种,它使用 置信上界 来平衡探索和利用。UCT 算法的核心思想是 在选择节点时,优先选择置信上界最高的节点。
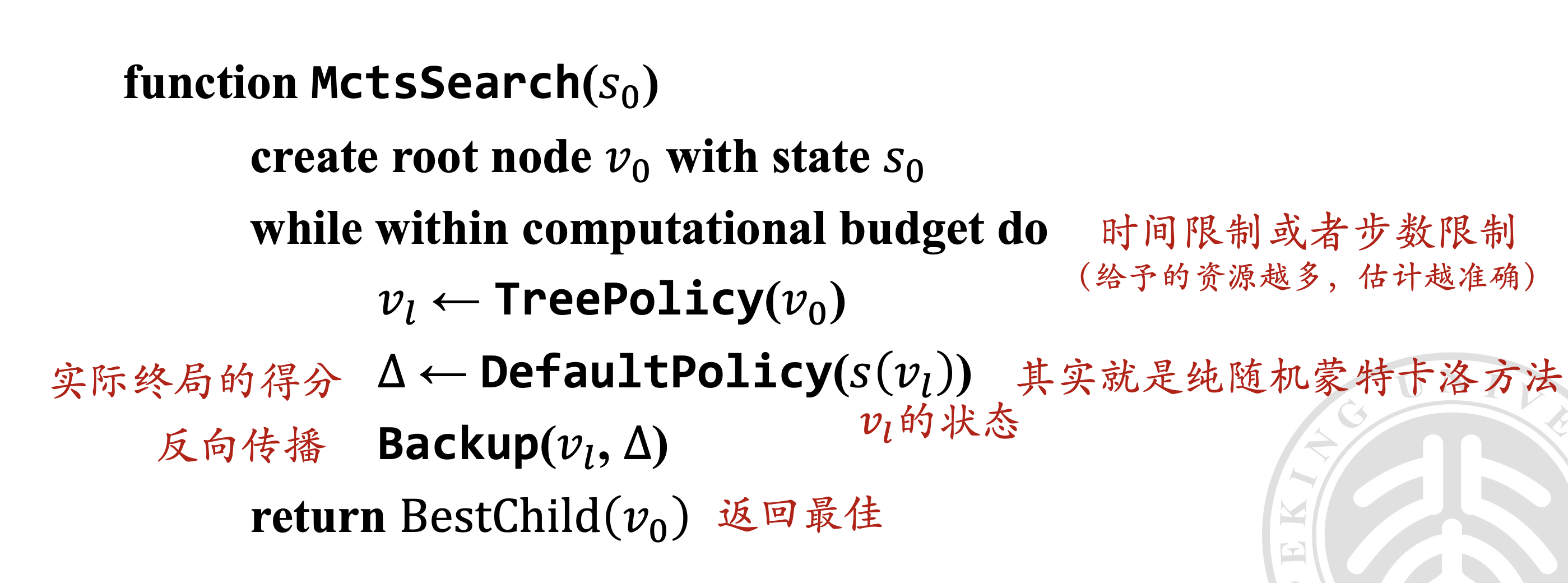
可以看到,这里实际上有时间 / 步数限制的,实际上搜索得越久、估值越准。
可以发现,如果一个节点是非终止状态,那么:
- 如果存在未访问过的子节点,那么优先展开未访问过的子节点
- 如果子节点都探索过了,使用
BestChild算法来获得一个子节点,移动到这个子节点,然后继续递归循环
循环终止的条件是下列之一:
- 找到一个完全未探索的子节点
- 当前节点是终止状态
注意到循环条件中,1 比较容易满足,而 2 对于对局很深的游戏几乎不可能满足,所以说实际运算时,其实无法将整棵搜索树完整地构建出来。只需建出访问过的节点所构成的这部分搜索树,并在需要访问子节点时 计算出应该访问哪一个就行 (先用几次 BestChild 然后根据 1 返回一个未被展开过的节点,继续探索)
对于终止状态,采用默认策略来进行模拟,然后进行反向传播更新搜索树。
UCB 公式#
UCB 公式是用于在 MCTS 中选择最佳子节点的,即 BestChild 函数中的计算方法。UCB 的目的是在探索和利用之间找到平衡。
其可以表示为:
代表 利用(exploitation),即节点 的平均价值,其中 是节点 的总价值(例如,获胜的次数), 是节点 被访问的次数。这一项反映了节点 当前的表现,鼓励算法利用已知的好走法。
代表 探索(exploration),其中 是探索参数, 是父节点 的访问次数。这一项 鼓励算法探索那些访问次数较少的节点。
在 BestChild 函数中,算法会遍历所有子节点 ,计算每个节点的 UCB 值,并选择 UCB 值最大的节点作为最佳子节点。这样,算法就能在已知的好走法和潜在的未知走法之间进行权衡,从而有效地进行树的搜索。
参考#
ouuan / 蒙特卡洛树搜索(MCTS)学习笔记 ↗:强推,讲的 MCTS 应该比我这篇好。