局部搜索算法#
全局搜索回顾#
- 全局搜索:从初始状态出发,遍历整个动作序列空间寻找目标状态。全局搜索需要记住搜索路径,受到内存限制,不适合解决超大规模问题。
- 无信息搜索:盲目遍历整个动作序列空间。
- A*:使用问题相关的启发式函数加快搜索。
局部优化#
为了快速解决 100+ 皇后问题,我们不再寻找全部解,而是 只找一个可行解。
我们不再关心得到解的路径(如,先摆第一个,再摆第二个…),只需要得到解(只要最后是解就行)。我们将启发式函数被改成状态估值函数,并充分利用它来寻找解。
全局搜索:对整个状态空间搜索,从初始状态开始(摆了零个)。利用摆皇后这个动作进行状态转移(动作确定路径),从摆了 个变到摆了 个
局部调整:先将八个皇后随意摆放到棋盘的八列上,然后调整被攻击的皇后,直到八个皇后互不攻击
八皇后问题重新建模#
- 初始状态 :八个皇后在棋盘上,每列有一个皇后。因为如果 8 个皇后不相互攻击,那么 8 个皇后肯定是在不同列的。
- 动作:移动任意列上的皇后到同列其他行(每个皇后有 7 个可能的动作,8 个皇后一共有 种可能动作)。
- 状态转移:移动后棋盘的样子( 邻居 状态,注意不再是父子状态,它们是 并行 关系,56 个)。
- 目标状态:皇后不互相攻击。
- 状态估值函数 :互相攻击的皇后对的数目,表示当前状态的好坏。如果两个皇后可以相互攻击,则 加 1。 以当前状态 为输入,输出一个评估值。
优化目标#
目标:使估值函数 最小化,目标是 。
策略:不断地将当前状态移动到邻居状态中估值更低(或者更高)的位置。直到到达目标状态。
优化过程#
基本思路:从一个初始状态出发,不断地向更好的邻居状态移动
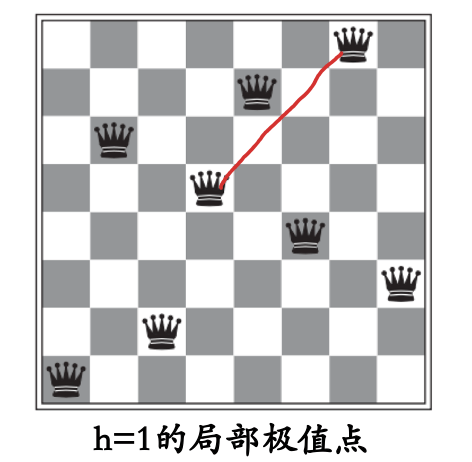
算法终止:当邻居状态中没有比当前状态更好的状态时(也即来到了 局部极值点 ),算法终止。
最优性条件:局部最优解不一定是全局最优解,但是局部最优解是全局最优解的一个 可能解。如果全局只有一个极值点,那么局部最优解就是全局最优解。
解空间的形状#
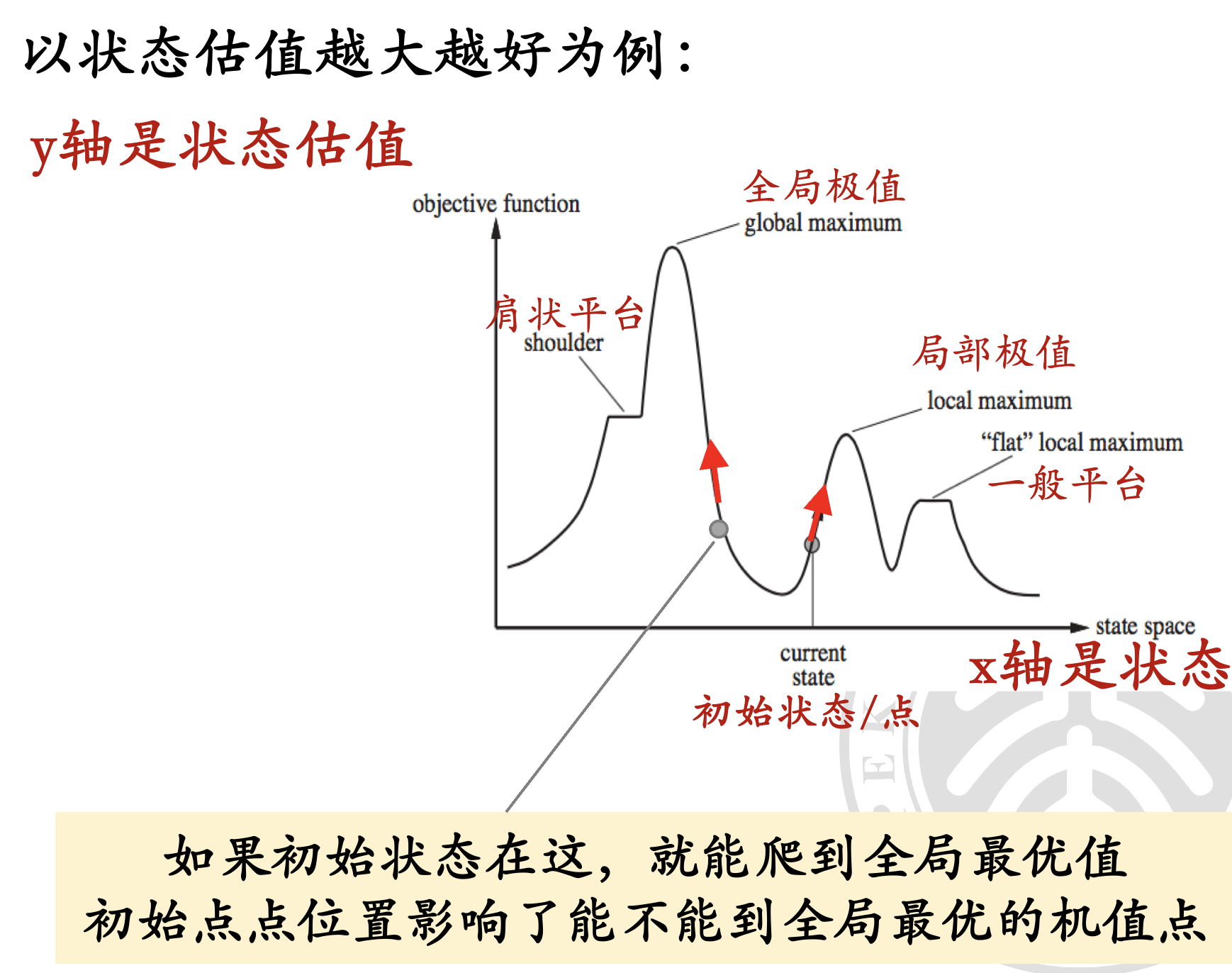
假设状态是一个连续变化的值,X 轴表示状态 ,Y 轴表示评估值 。对于一维的情况,评估值变化与各概念的关系如上图所示。
-
局部极值:某个区域内,某个点的评估值最高(或最低)。
多个局部极值点存在时,贪婪策略最终到达的极值点取决于 初始状态。
-
全局最优:全局最优解是所有局部最优解中评估值最高(或最低)的解。
-
平台:邻近状态评估值相同,无法决定移动方向。
-
肩状平台:一侧评估值可上升,另一侧下降。
实际情况中,状态的维度会更高(甚至无法可视化)。
解空间形状带来的问题#
如何跳出局部极值点而奔向全局最优点?
进入平台时如何解决?
这些在后文都会有介绍。
局部优化算法的完备性和最优性#
- 完备性:如果目标存在,则算法总能找到。
- 最优性:算法能找到全局最优解。
爬山法(Hill Climbing)#
爬山法是一种局部搜索算法,主要用于求解优化问题。
以下是几个主要版本及其特点:
最陡下降爬山法(Steepest-Ascent Hill-Climbing)#
算法#
- 每次选择相邻节点中评估值 最优(这暗示最陡) 的一个,移动到该节点。
- 算法会在一个 山峰 (即四周点的评估值都比它低,局部最优值 )处停止。
- 不存储搜索树,只存储 当前节点 和一个 估值函数。
伪代码#
- 将初始状态设置为当前状态。
- 循环:
- 找出当前状态下估值最大的邻居节点。
- 如果邻居节点的估值小于当前状态,则返回当前状态作为解(这代表当前状态是局部最优解)。
- 否则,将当前状态更新为邻居节点。
优点:内存开销小,只需要存储当前状态。
缺点:可能陷入 局部最优。
优化:随机平移#
随机选择一个估值函数的值相同的邻居节点,尝试跳出局部最优。需要设置一个 移动次数上限,避免死循环。
只能跳出 肩状平台 (一侧),无法跳出整体平台。
随机爬山法(Stochastic Hill-Climbing)#
算法#
- 从 更优 的邻居点中 随机选择一个 进行移动,而 不是选择最优点 (那就是最陡爬山法了)。
- 比最陡下降爬山法 收敛慢,但在某些空间中 可能找到更优的解。
- 选择概率可以根据陡峭程度设定,以加速收敛。
第一选择爬山法(First-Choice Hill-Climbing)#
过往缺陷#
最陡爬山和随机爬山法都要计算所有邻居的估值,也即 生成估值表,当邻居很多的时候,需要的计算量很大。
第一选择爬山法通过每次只计算一个状态来避免此问题。
算法#
- 随机选择一个邻居,如果它比当前状态好,就立即移动到邻居状态。否则,继续随机选择邻居,直到找到一个比当前状态好的邻居。
- 不需要生成估值表,每次只需要计算一个状态的估值。
随机重启爬山法(Random-Restart Hill-Climbing)#
过往缺陷#
之前的算法都是 不完备 的,因为可能陷入局部最优。
随机重启爬山法通过选择多个随机初始状态(类似暴力算法)来在一定程度上解决这个问题(没有完全解决),多次尝试寻找最优解,达到 近乎完备。
算法#
-
找不到解时,从随机位置重新开始。
-
多次随机产生初始状态,接近完备,因为总会有一个初始状态能找到解(还有可能直接初始化到了解的位置(bushi))。
成功与否 取决于状态空间的形状,如果局部极值和平台不多,能快速找到好的解。
如果一次就找到最优解成功率是 ,那么期望的重启次数是 。
模拟退火算法#
过往问题#
-
爬山法:只向更优邻居点移动,不会向状态估值更差的邻居移动,可能 陷入局部极值,因此是不完备的。
-
纯粹的随机游走算法
- 不使用 的搜索算法。
- 等概率地向任何一个邻居移动,是 完备 的,但却是 非常低效的。
从而,我们想到是否可以适当的结合两种算法,利用爬山法加快搜索,利用随机游走算法的随机性提高完备程度。
仿照物理中的退火,我们提出如下思想:
- 在搜索的初期以一个较大概率允许向下走
- 这个概率和这一步 “坏” 的程度成指数关系。
- 随着时间的推移这个概率会变小,这个概率会随着 “温度” 的下降而下降。
我们可以设法让 “温度” 足够慢地下降,此时算法会最终以接近 1 的概率找到全局最优解(因为这样会很接近随机游走算法)。
伪代码#
-
温度:表示为 ,随着时间 的变化而变化。
-
ΔE:表示邻居状态值与当前状态值的差。
-
概率跳跃:以概率 决定是否跳跃到新的邻居状态。
-
在指数分母上,随着时间增加跳跃概率越来越小。
-
在指数分子上,跳跃概率为随着 的增加而增加。
当 为正时,直接跳跃到新的邻居状态。这对应邻居估值高于当前状态,跳过去是优化的。
当 为负时,跳跃概率为 ,跳跃概率随着温度的降低而降低。这对应跳过去是非优化的。这样看上去会更差,但是正是因为在非优化的情况下还有概率选择跳跃,所以模拟退火算法能够跳出局部最优,增加达到全局最优的可能。
-
超参数(Hyper-parameters)选择#
- 初始温度(步幅):应设定多大?
- 降温速率:以何种速率降低温度?
- 终止温度:温度降到什么程度可以报告解?
具体问题具体分析:根据具体问题调整超参数。
总结#
-
初期允许以较大概率向下走,概率与 “坏” 的程度成指数关系。
-
随时间推移,概率变小,温度下降。
若温度足够慢地下降,算法会最终以 接近 1 的概率找到全局最优解。
对比#
爬山法与模拟退火法对比:
- 爬山法:简单搜索法,可能陷入局部最优。
- 模拟退火:通过概率跳跃机制,有效跳出局部极值,寻找全局最优解。
内存开销:这两个算法都只记录当前节点(而不是像之前的全局搜索的搜索树一样记录很多的节点状态),内存不会随着时间增加。
不过,这也是缺点,因为没法很好的利用内存来加快搜索。
局部束搜索(Local Beam Search)#
算法过程#
- 从 个随机生成的初始状态开始。
- 每一步,所有 个状态各自生成后继,共有 个后继。
- 若 个后继中有一个是全局最优点,则算法结束。否则,从 个后继中找出 个最好的后继作为新状态,继续算法。
比较#
局部束算法不同于同时运行的多个随机重启爬山法。
- 同时运行的多个随机重启爬山法:各搜索独立进行,不通讯。
- 局部束搜索:第 3 步中选择最优的 个后继作为新状态,这些状态间相互通讯。如果一个状态找到多个好的后继,会告知其他状态一同继续搜索。
问题#
基础版本的局部束搜索易于聚集到状态空间中的一个小局部区域,缺乏多样性,使得在寻找更优解方面与爬山法相似,容易陷入局部极值点。
缓解方案#
一种变种是 随机束搜索(Stochastic Beam Search),类似于随机爬山法,能减轻陷入局部极值点的问题。随机束搜索不再选择 个最好的后继,而是根 据一个函数计算出与后继优劣程度相关的值,并以此为概率选择 个后继。
随机束搜索类似于 “自然选择法则”:适者生存概率高,不适者死亡概率高。
遗传算法(Genetic Algorithms)#
遗传算法是 随机束算法 的一个变种。与单个状态产生后继节点不同,遗传算法的后继节点是由 两个父状态结合 产生的。这类似于父母生成孩子的过程,因此称为遗传算法。
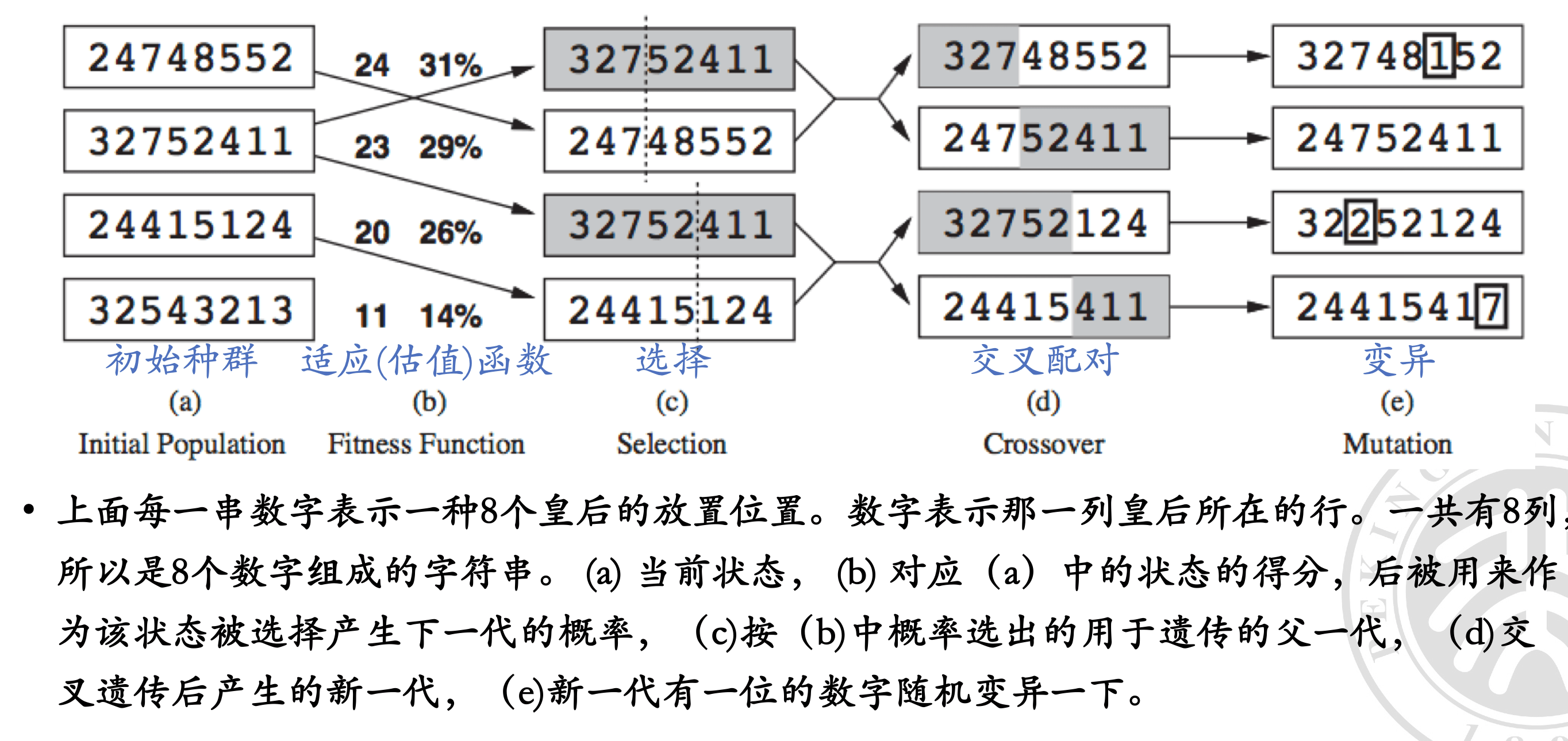
伪代码#
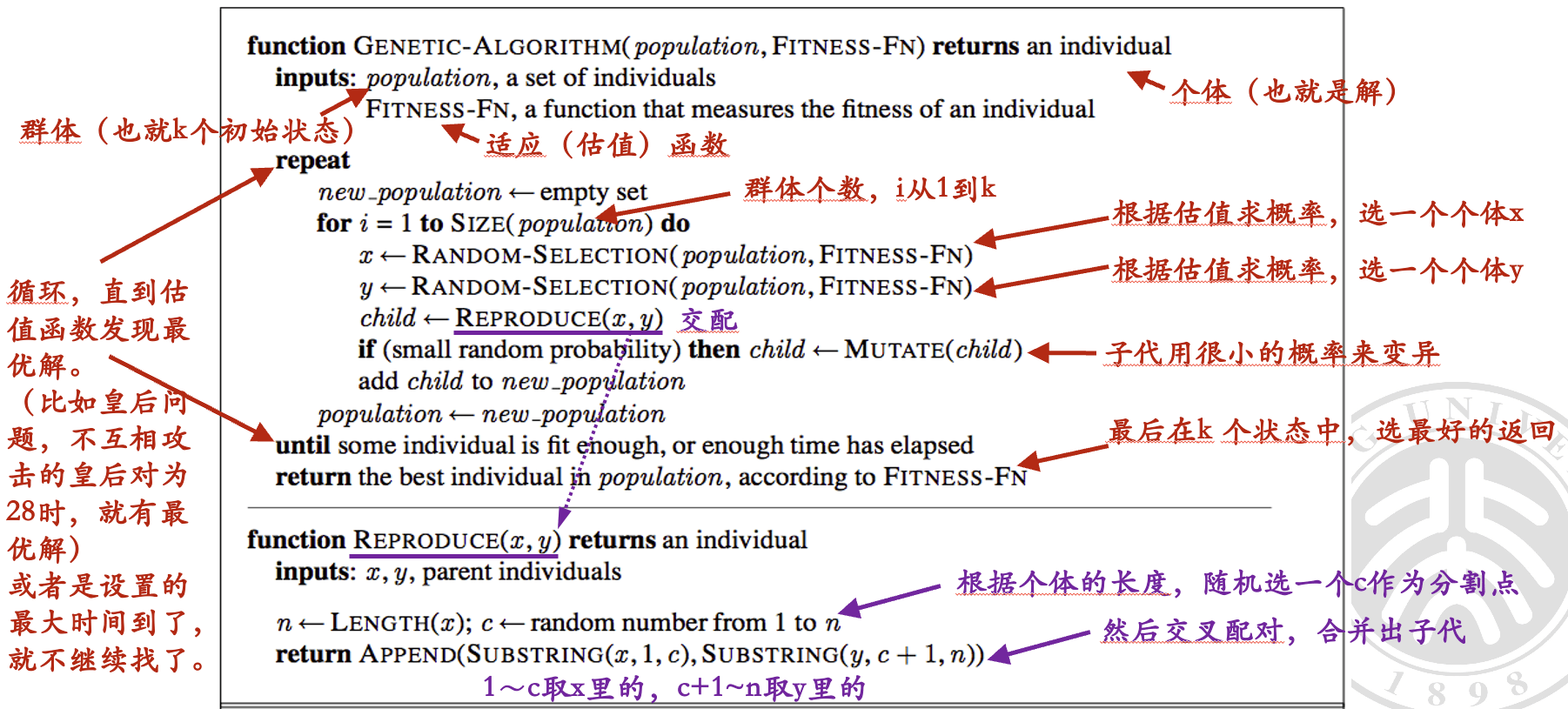
主要特点#
后代多样性大:遗传算法类似于 高级生物的有性繁殖,后代多样性大,变异概率高,不易陷入局部最优。
注意,这也同时导致了遗传算法的不稳定性。
遗传算法结合了 爬山法 和 随机探索,并在并行的搜索线程中交换信息。
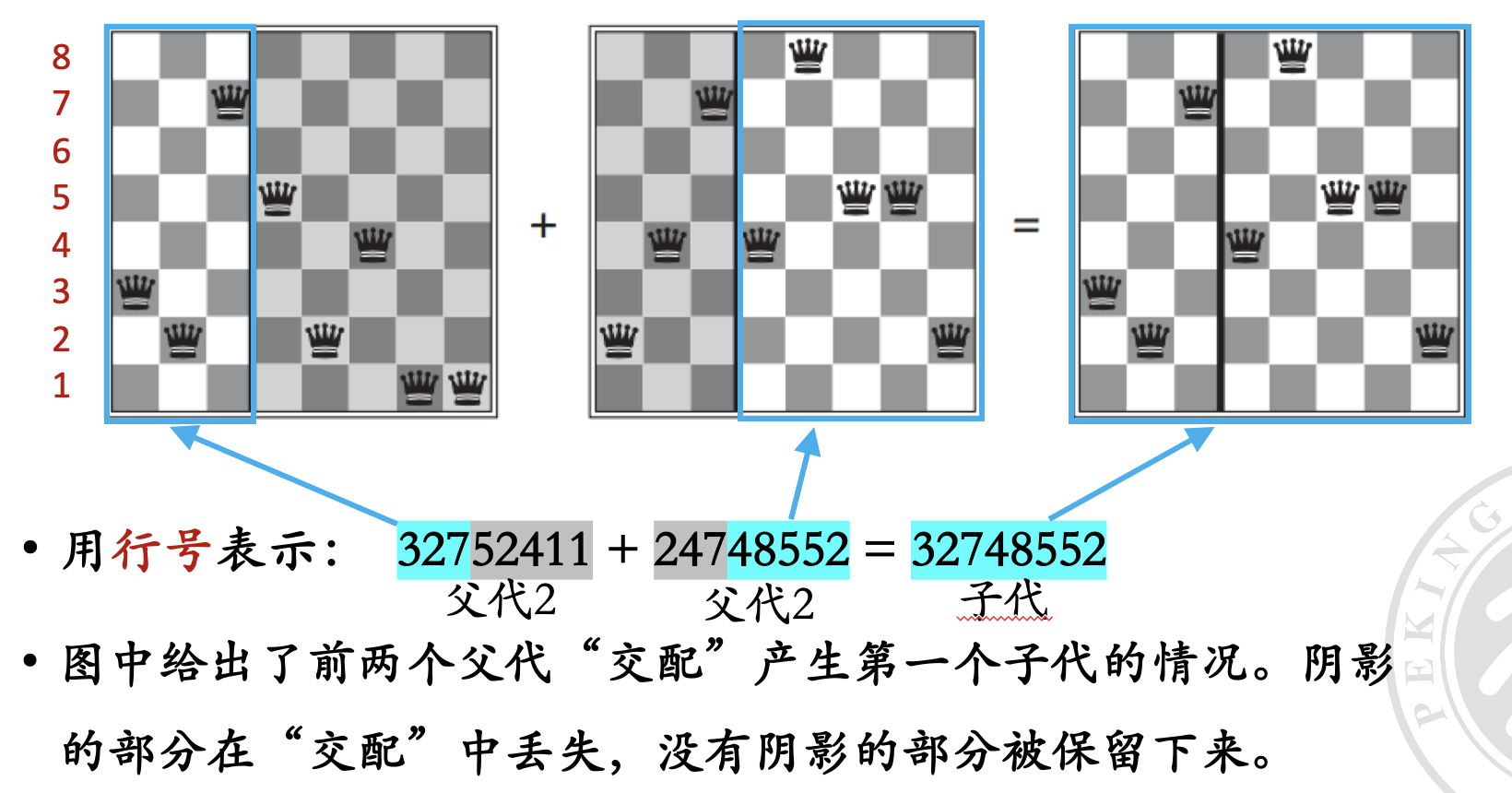
- 交换子串 是遗传算法的主要优点,可以将优秀的功能块组合起来,提高后代的质量。
- 数学上,如果父代编码是随机的,交叉并不会带来好处。
- 直觉上,交叉可以将 具有良好功能的块 组合在一起,从而产生更好的下一代。
模式与状态#
-
模式 Schema:在遗传算法中,模式(Schema)指的是一种部分子串,可以包含特定位置的固定值,也可以有任意值。例如,在一个二进制字符串中,模式 1*0 表示以 1 开头,以 0 结尾,中间的位可以是 0 或 1。
-
模式的优越性:如果一个模式在群体中表现得比平均水平好,那么这个模式会更有可能通过遗传操作(选择、交叉、变异)传递给下一代。这意味着,具有这种模式的个体数量会在后代中增加。
-
良好模式的积累:当一个模式能够很好地表达问题中的重要特征时,遗传算法的表现会更好。
-
状态的良好表达:为了使遗传算法表现良好,问题的状态需要被良好地表达。这意味着在编码方案中,重要特征和模式需要被明确地表示出来,以便遗传算法能够有效地选择和遗传这些特征。
连续空间中的局部搜索#
例子:地图上新建机场#
目标: 在地图上新建三个机场,使每个城市与离它最近的机场的距离的平方和最小。
状态空间: 每个机场的坐标 。这是一个六维空间。
目标函数:
其中 表示离机场 最近的城市集合。目标是使 最小。
离散化方法#
通过将地图坐标离散化来解决连续问题。
- 每次移动一个机场的 或 坐标 , 越小,精度越高。
- 每个机场的当前状态有 12 个可能的邻居状态。
局部搜索算法#
- 状态:
- 评估函数:
- 邻居: 一个机场的( 或 )
建模#
- 初始状态: ,随机位置
- 动作: 任何一个 或 都可以 (12 个合法动作)
- 状态转移: 采取动作后的位置(转移到 12 个邻居状态之一)
- 目标状态: 使得 最小的 取值
- 状态估值函数:
注意事项#
- 可以使用前面介绍的任何局部搜索算法,例如爬山算法、模拟退火算法等。
- 离散化精度()会影响搜索结果的准确性。
- 需要考虑如何处理多个机场同时移动的情况。
优化方法#
-
爬山 / 随机爬山 / 模拟退火
-
梯度下降 / 上升:
若函数可微,可以借助梯度信息来更新(而不需要求具体的离散后的邻居的估值):
其中:
-
是学习率 / 步长
- 如果 太小,需要太多的步骤、更新慢
- 如果 太大,搜索可能会越过极值点
-
是梯度
-
对应不同的优化方向。
若估值函数不可微,则使用 经验梯度 的值法
-
和在离散空间一样,在连续空间里,局部搜索算法的最大难题仍是 局部极值和平台。为此,采用和离散空间一样的随机重启和模拟退火经常是有效的。
最小化冲突算法#
最小化冲突算法用以解决 约束满足问题(CSP)。
约束满足问题(CSP, Constraint Satisfaction Problem):在一组变量和一组约束条件下寻找一个变量赋值的过程,使得所有变量满足给定的约束条件。
CSP 的细节在后文讨论。
最小化冲突算法伪代码#
八皇后问题的 CSP 建模#
我们可以通过以下步骤将八皇后问题建模为一个 CSP:
- 变量定义:定义 8 个变量,每个变量表示一个皇后的位置。通常用 表示第 行上的皇后所在的列位置。
- 变量取值范围:每个变量 的取值范围是 ,表示皇后可以放在第 行的任意一列。
- 约束条件
- 不同变量取值不同:即 (不同的皇后不能在同一列)。
- 不在同一对角线:即 (不同的皇后不能在同一对角线上)。
算法#
- 初始化:随机放置 8 个皇后,使其符合所有行和列约束。
- 冲突检测:计算当前放置下的冲突数,即有多少对皇后彼此攻击。
- 冲突最小化:通过移动某个皇后减少冲突。例如,选择冲突最多的皇后,尝试移动到其他列,看哪个位置的冲突最少。
- 迭代:重复冲突检测和最小化,直到没有冲突(即找到解)或达到预定的最大迭代次数。
约束满足问题 CSP#
约束满足问题将一个系统和它的状态当作一个整体,寻找状态解。
-
一个约束满足问题有三个组成部分,, 和 :
- 是 变量,。
- 是 值域,,每个变量一个值域(取值范围)。
- 是 约束,用于描述变量取值之间的关系。
-
每个值域 包含一组对于变量 可行的取值 ;每个约束条件 包含一对数值 , 是约束条件中涉及的变量, 定义了变量的取值范围之间的关系。
CSP 问题的解#
- 在 CSP 问题中,令每个变量一个取值,,如果 不违背任何一个约束条件,则称为这个 CSP 问题的一个 可行解。可能存在多个可行解。
- 如果我们给定一个解的评价方式,则我们还可以寻找一个 最优解。最优解不一定是可行解,但是 是可以找到的最好的解。
在实际约束问题中,我们可能需要寻找:
- 一个可行解
- 全部可行解
- 一个最优解
把问题建模成约束满足问题 CSP 的原因#
-
表示能力强:CSP 可以表示很宽泛的类别的问题。设计通用 CSP 求解器,使用 自动优化技术 迅速排除大量的无关搜索空间,比基于状态空间的搜索算法更快。
-
可解释性:CSP 的约束条件使得我们容易知道为什么某个赋值不是解(违背了哪个约束),并可以立即放弃对当下路径后续探索。
许多使用传统方法不能解出的问题,建模成 CSP 问题可以很快地解出。
CSP 模型变量的类型#
变量 :类型可以是 离散的,也可以是 连续的。
值域 :可以是 有限的,也可以是 无限的。
离散类型变量的取值 也可以是 无限的,例如 整数,或者是 字符串。
CSP 约束条件的类型#
用 C 描述约束的量来对其分类#
- 一元约束 (unary constraint):针对单个变量取值的约束。
- 二元约束 (binary constraint):涉及到两个变量。
- 三元约束 (ternary constraint):例如,变量 的取值要在变量 和 之间,表示成三元约束,Between 。
- 全局约束 (global constraint):含有任意多个变量,最常见的全局约束是 All diff,其含义是所有变量的取值必须互不相同。
用 C 是否是强制性的来分类#
-
绝对约束:违背这种约束意味着排除了成为解的可能性。
-
优先约束 (preference constraints):用来描述哪些是优先选择的,可用表示求最优解。这意味着,满足这个约束越好,获得的解就越好。
优先约束一般会实现为给每个变量的取值增加一个代价(costs),这样,含有优先约束的 CSP 问题就称为约束优化问题(constraint optimization problem),简称 COP。
约束传播:CSP 中的推理#
在普通的状态空间搜索中,我们能做的事情 只有搜索。
而在 CSP(约束满足问题)中,除了搜索,还可以进行 推理(也称为约束传播)。
约束传播:通过使用约束来 减少一个变量的可能取值,从而减少其他变量的可能取值。约束传播可以与搜索相结合,也可以先进行约束传播的预处理,然后再进行搜索。
有时,预处理就可以解决全部问题,不用再进行搜索。
点一致#
点一致指变量的所有取值都满足一元约束。通过点一致性算法去除不满足一元约束的取值。
例:如果 的取值范围是 ,且有约束 ,那么经过点一致处理后, 的取值范围变为 。
边一致#
边一致指变量的所有取值都满足二元约束。
例:如果 和 的取值范围分别是 和 ,且有约束 ,那么经过边一致处理后, 的取值范围变为 , 的取值范围变为 。
我们称一个 网络是边一致 的,如果每个变量相对于 其他任意变量 都是边一致的。
约束传播的应用#
使用约束传播可以去除不合理的解,从而缩小值域,提高解决问题的效率。
约束满足问题的通用求解方法#
- 通用约束求解器:如 MiniZink
- 自动生成求解程序:如 PDL2C