- 将标准 Transformer 迁移到 CV 任务上,尽可能少的做修改
- 不引入 CNN 作为前置网络,因为这样会造成归纳偏置(局部性、平移等变性)
- 将图片等分地划分为很多 patches,每个 patches 越小则计算量越大(序列长度越大),注意 Transformer 的计算复杂度是 序列长度 n 的平方 O(n2)
BEiT#
- 迁移 BERT 到视觉任务
- 模型学习恢复原图像的 视觉令牌,而不是遮蔽块的原始像素
如何理解嵌入 / 令牌:图像具有很高的维度,但是并不是所有维度都是有用的(乱码图片),有些维度是冗余的,有些维度是有用的。令牌就是对图像的有用信息的一种抽象表示。通过将图像从高维像素空间映射(也就是嵌入)到(相对低维的)令牌空间,可以更好地捕捉图像的语义信息。并满足一些诸如相似者近、支持语义操作的特点。
dVAE#
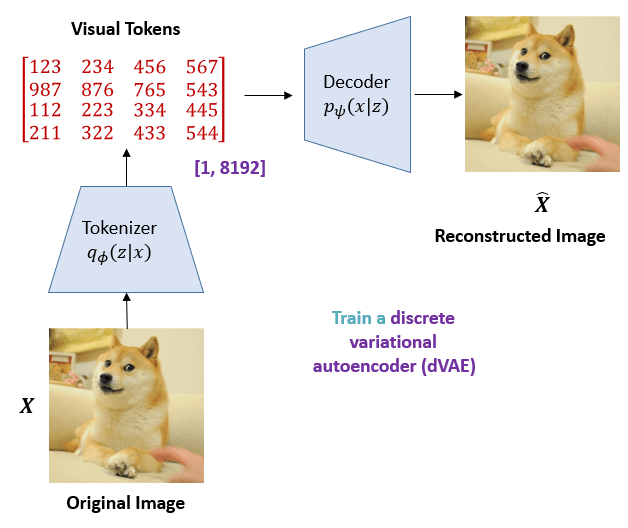
Tokenizer / Encoder#
Decoder#
Loss#
因为我们想要能够从嵌入编码得到的分布中重新采样、解码得到的图片具有随机性,所以为了防止退化成一对一的编码、解码(AutoEncoder),我们人为的限制(表示随机性的)方差不得退化为 0,也即引入先验假设 p(Z)=N(0,I)。通过要求均值方差拟合网络的输出 p(Z∣X) 与标准正态分布 N(0,I) 尽可能接近。这样的话,我们就有
p(Z)=X∑p(Z∣X)p(X)=X∑N(0,I)p(X)=N(0,I)
可以看到,在这个要求下,所得到的编码的分布也是一个正态分布,也就满足了我们的先验假设。
而这个过程,我们是通过引入额外的 KL 散度来实现的,也就是 ELBO 下界:
KL(N(μ,σ2)∣∣N(0,1))=∫2πσ21e−(x−μ)2/2σ2(loge−x2/2/2πe−(x−μ)2/2σ2/2πσ2)dx=∫2πσ21e−(x−μ)2/2σ2(log{σ21exp{21[x2−(x−μ)2/σ2]}})dx=21∫2πσ21e−(x−μ)2/2σ2[−logσ2+x2−(x−μ)2/σ2]dx=21(−logσ2+μ2+σ2−1)
接下来根据重建误差与 KL 散度加和构成的损失函数,训练 Tokenizer:
L=Ez∼pϕ(z∣x)[logqψ(x∣z)]−DKL[pϕ(z∣x),p(z)]
训练过程#
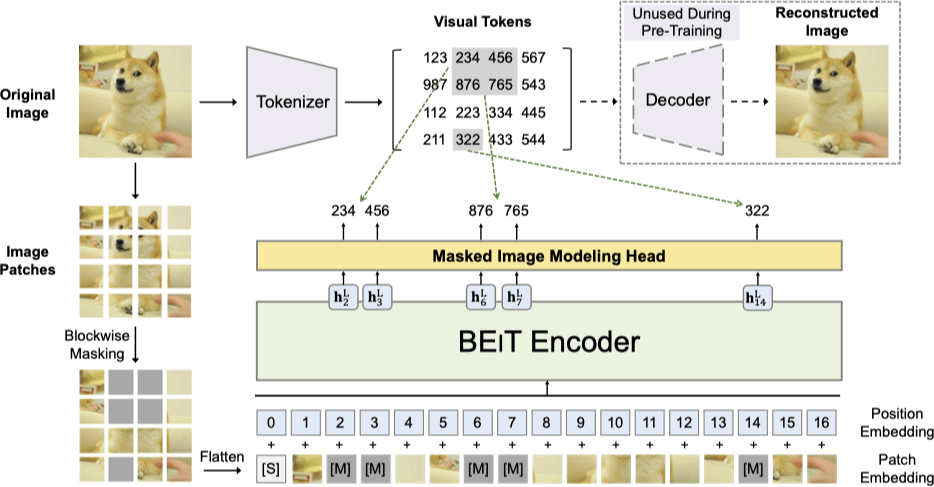
- 预训练 dVAE / Tokenzier
- 给定图片,切出 patches,通过预训练的 tokenizer(dVAE 里的 tokenizer 部分) 给出所有 patches 的 token
- 盖住一些 patches(通过对位替换为一个特殊的、可学习的编码 e[m]),通过 BEiT Encoder 预测盖住的这些个 patch 的相应的 visual token
- 最大化对于盖住的 patches 输出真实 token 的概率
损失函数#
dVAE#
采用的是 ELBO 下界
(xi,x~i)∈D∑logp(xi∣x~i)≥(xi,x~i)∈D∑Visual Token Reconstruction(Ezi∼qϕ(z∣xi)[logpψ(xi∣zi)]−DKL[qϕ(z∣xi),pθ(z∣x~i)])
- xi: 原始输入图像。
- x~i: 对原始图像进行一些遮挡处理后的图像。
- D: 数据集,包含训练数据对 (xi,x~i)。
BEiT#
总损失函数:
(xi,x~i)∈D∑(Stage l: Visual Token ReconstructionEzi∼qϕ(z∣xi)[logpψ(xi∣zi)]+Stage 2: Masked Image Modelinglogpθ(z~i∣x~i))
分为两个阶段:
Visual Token Reconstruction#
- qϕ(z∣xi): 条件概率分布,表示给定原始图像 xi 时,隐变量 z 的概率分布。这个部分是通过预训练的 tokenizer 获取的。
- pψ(xi∣zi): 条件概率分布,表示给定隐变量 zi 时,重建的原始图像 xi 的概率分布。
在这个阶段,目标是最大化重建的图像与原始图像之间的相似度,即通过最小化损失来进行训练 dVAE,尤其是其中的 Tokenizer
Masked Image Modeling#
- pθ(z∣x~i): 条件概率分布,表示给定遮挡后的图像 x~i 时,隐变量 z 的概率分布。
这个阶段的目标是通过 BEiT Encoder 预测被遮挡的 patches 对应的 visual token。这里的损失主要通过预训练的模型预测真实 token 来进行最小化。
重建会更关注高频细节、短范围依赖。
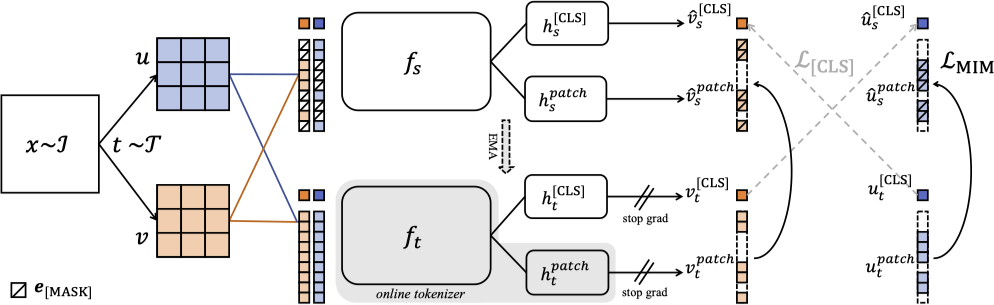
iBOT#
- 同一张图片经过不同的图像增强,仍应该具有相似的语义信息,所以采用
- student 作为目标网络,teacher 作为 tokenizer,tokenizer 和目标网络同步学习
训练过程#
损失函数#
自蒸馏#
L[CLS]=−Pθ′[CLS](v)TlogPθ[CLS](u)
- 对于一张图片,不同的数据增强过后,经过两个网络得到的信息应当相近
- 为 [CLS] 标签上的自蒸馏,不同的数据增强上交叉进行
- 目标是使学生网络的输出逼近教师网络的输出,提高预测一致性。
MIM#
LMIM=−i=1∑Nmi⋅Pθ′patch(ui)TlogPθpatch(u^i)
-
mi 是掩码,用于只选择被 Mask 部分
-
为 patch 标签上的自蒸馏,同一数据增强上进行
-
计算同一张图片在老师 - 学生间重构的交叉熵,可以替换得到 v 的对称化损失
-
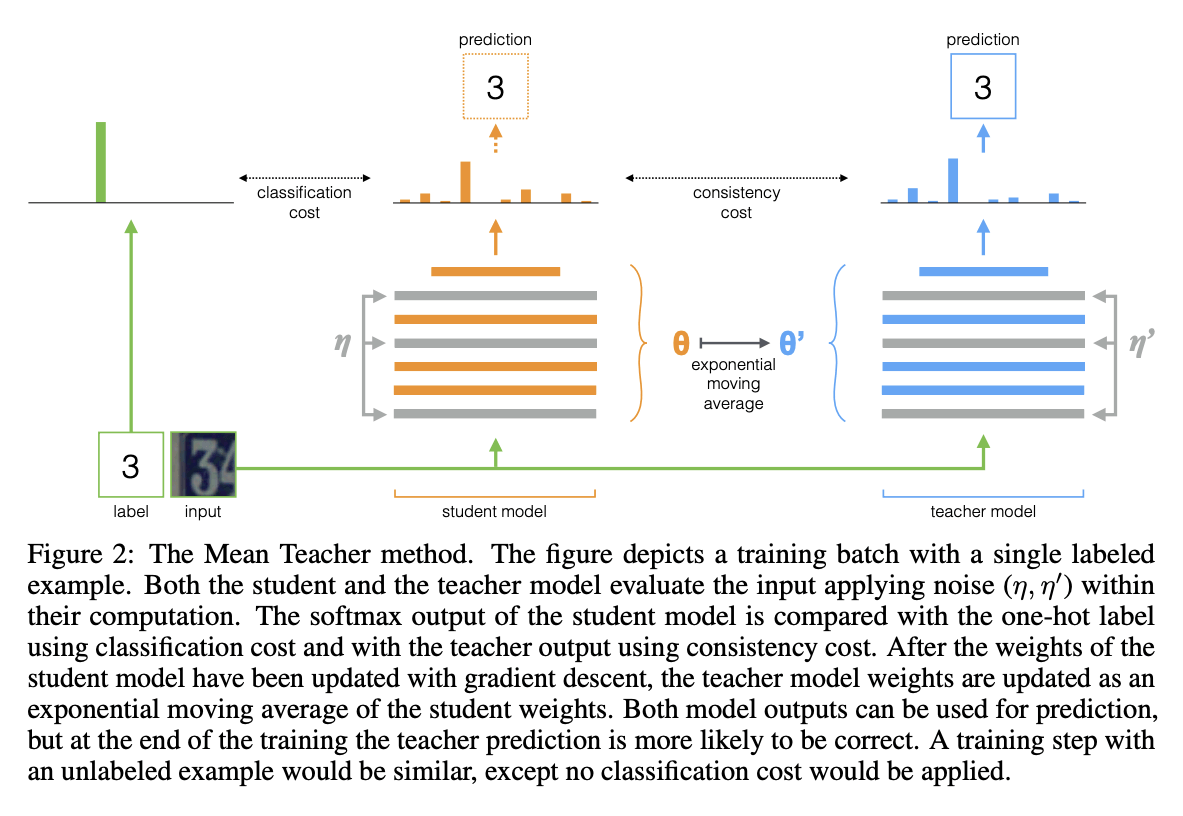
使用 EMA + 学生模型的梯度(而不是老师模型自己的梯度),来更新老师模型
-
共享参数,可以得到更好的效果:
hs[CLS]=hspatchht[CLS]=htpatch
伪代码#

输入变量、初始化#
- gs 和 gt: 学生网络和教师网络,用于特征提取。
- C,C′: 分别是基于 [CLS] token 和图像块(patch)tokens 的中心。
- τs,τt 和 τs′,τt′: 分别是学生和教师网络在 [CLS] token 和图像块(patch)tokens 上的温度参数,用于控制软标签的 “锐化” 程度。
- l,m,m′: 分别是网络、 [CLS] token 和图像块(patch)tokens 的动量更新率。
- 将教师网络的参数初始化为学生网络的参数,使其在开始时保持一致。
- 数据加载和增强
- 通过数据加载器循环遍历数据,每次处理一个批次的数据 x。
- 对每个数据点 x 进行两次随机视图生成(augment),得到 u 和 v。
- 遮蔽操作
- 对 u 和 v 进行随机的块状遮蔽,生成 u^ 和 v^,同时记录遮蔽的位置 mu 和 mv。
- 特征提取
- 使用学生网络 gs 和教师网络 gt 处理遮蔽后和未遮蔽的视图,提取 [CLS] token 和图像块(patch)tokens 的特征。
- 损失函数计算
- L[CLS] 计算学生和教师网络输出的 [CLS] token 特征之间的差异。
- LMIM 计算图像块(patch)tokens 特征之间的差异,其中只有遮蔽的部分参与计算。
- 反向传播和参数更新
- 计算总损失并执行反向传播。
- 更新学生网络的参数,并根据动量率更新教师网络的参数。
- 更新中心 C 和 C′,使用动量平均策略。
辅助函数 H#
- 计算两组特征之间的信息熵损失。这个函数首先停止梯度传递到 t
- 对 s 和 t 应用 softmax 操作进行归一化,然后计算交叉熵。
- 如何更好的理解 EMA 以及蒸馏的过程,为什么老师的输出可能更好?
MAE#
训练过程#
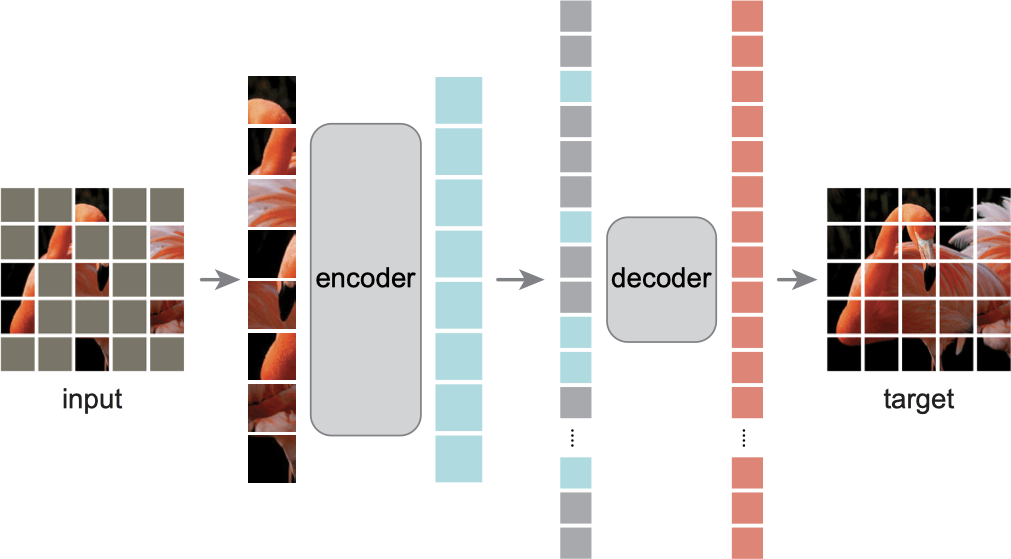
- 首先对图片切出 patches,然后随机掩蔽(通过打乱后取前面一部分来实现),只取没被掩蔽的部分输入 encoder,尝试得到具有语义信息的 token
- 通过一个全连接层适配到 decoder_embed,然后依照顺序插入 [Mask]
- 使用 decoder 恢复到像素空间,使用 MSE 计算损失
Credit#