神经元模型#
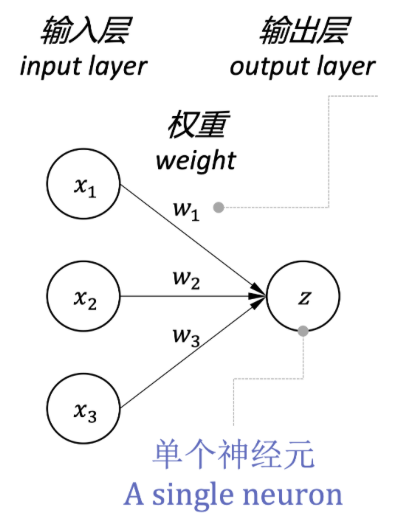
神经元模型是神经网络的基本单元,它接收输入信号,对输入信号进行 加权求和 ,权重 / 参数(weight/parameter)的绝对值越大,则代表对应的输入 对输出影响越大,然后通过激活函数处理,最后输出结果。
基于向量相乘的实现,分为列格式和行格式。
列格式#
在这种格式下, 的每个分量都是一个特征, 的每个分量都是对应特征的权重。 是一个标量。
行格式#
同列格式一样,这里 的每个分量也都是一个特征, 的每个分量也都是对应特征的权重。 是一个标量。
不同点在于,这种格式在代码中更为常用,这是因为我们经常多个样本一起处理(mini-batch),通过将第一个维度(第 0 维)留给样本数,可以更方便的处理多个样本。
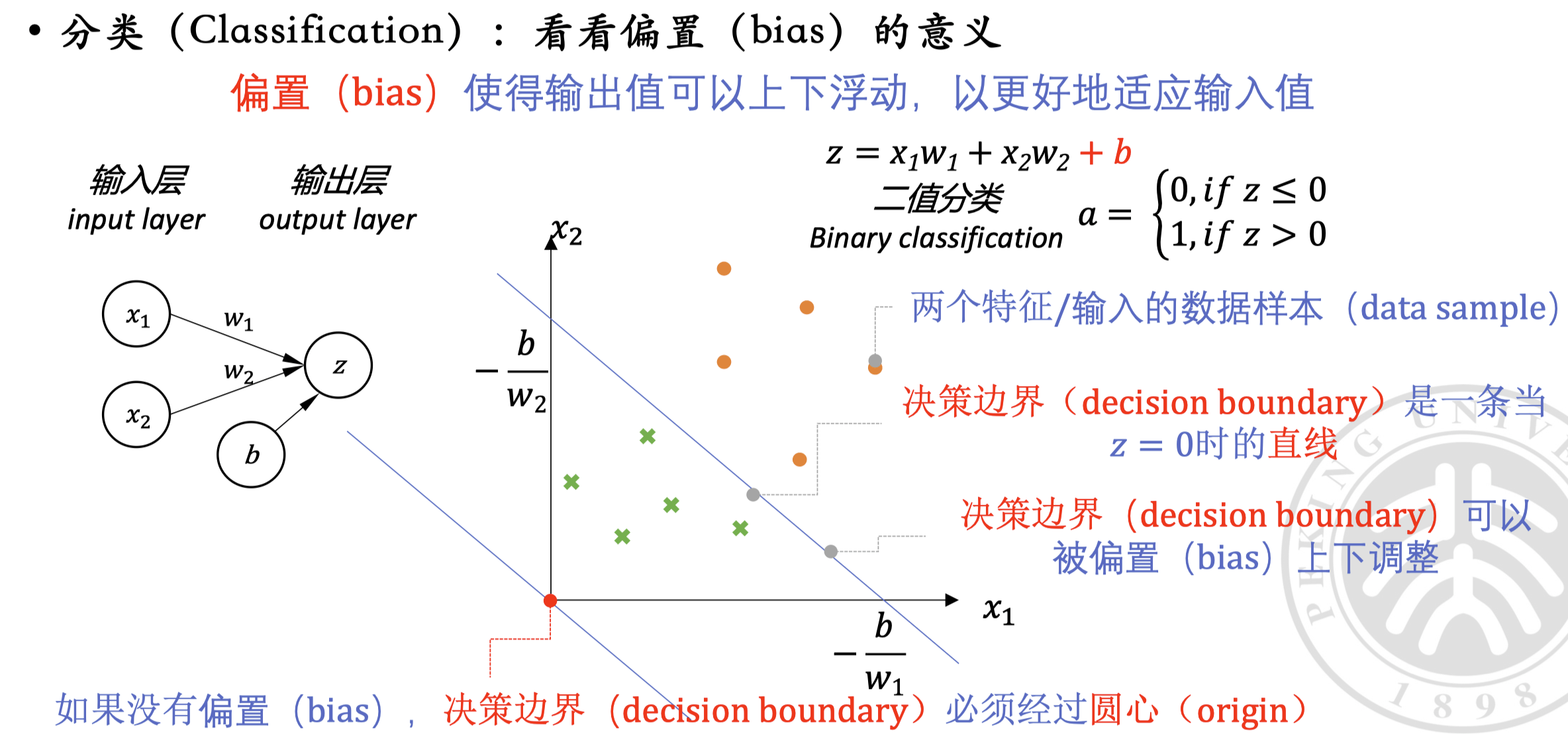
当然,我们也可以再加上偏置(bias) ,来增加模型的表达能力(改变原先必然过圆心的决策边界):
激活函数#
激活函数 (activation function):对神经元的输出进行非线性变换,提供非线性性(non-linearity),增加神经网络的表达能力。
常用的激活函数及对应的公式、映射关系如下:
- Sigmoid 函数
- 公式:
- 映射关系:,输出值在 0 到 1 之间,用以 表示概率
- Tanh 函数
- 公式:
- 映射关系:,输出值在 -1 到 1 之间,常用于 回归任务
- ReLU 函数
- 公式:
- 映射关系:,最常用的分类函数,可以用于特征提取、 简化网络优化 (缓解梯度消失问题、偏导数好计算)
- Leaky ReLU 函数
- 公式:
- 映射关系:,解决 ReLU 函数中负数部分输出为 0 的问题,其中的 是一个小的常数,如 0.01,在 Parametric ReLU 中,这个 是一个可学习的参数
- Softmax 函数
- 公式:
- 映射关系:,输出值在 0 到 1 之间,用以 表示概率,使得所有激活值之和为 1
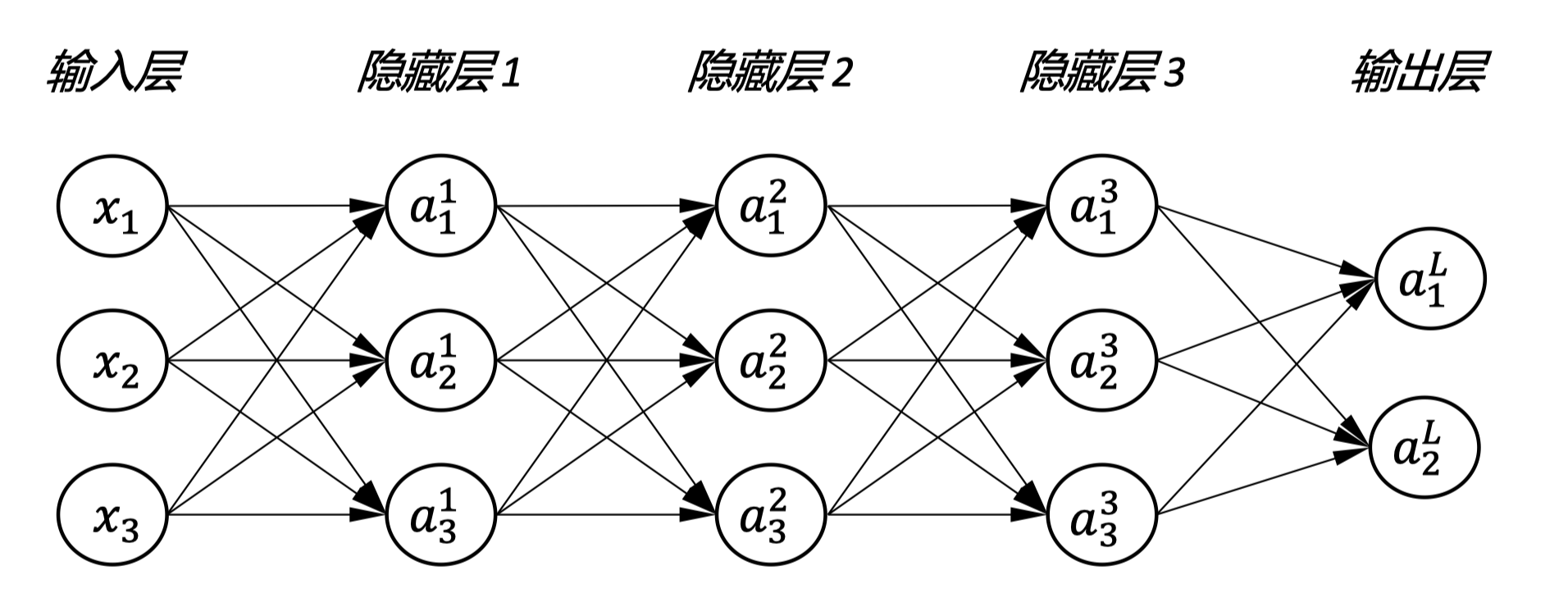
多层感知器(Multi-Layer Perceptron, MLP)#
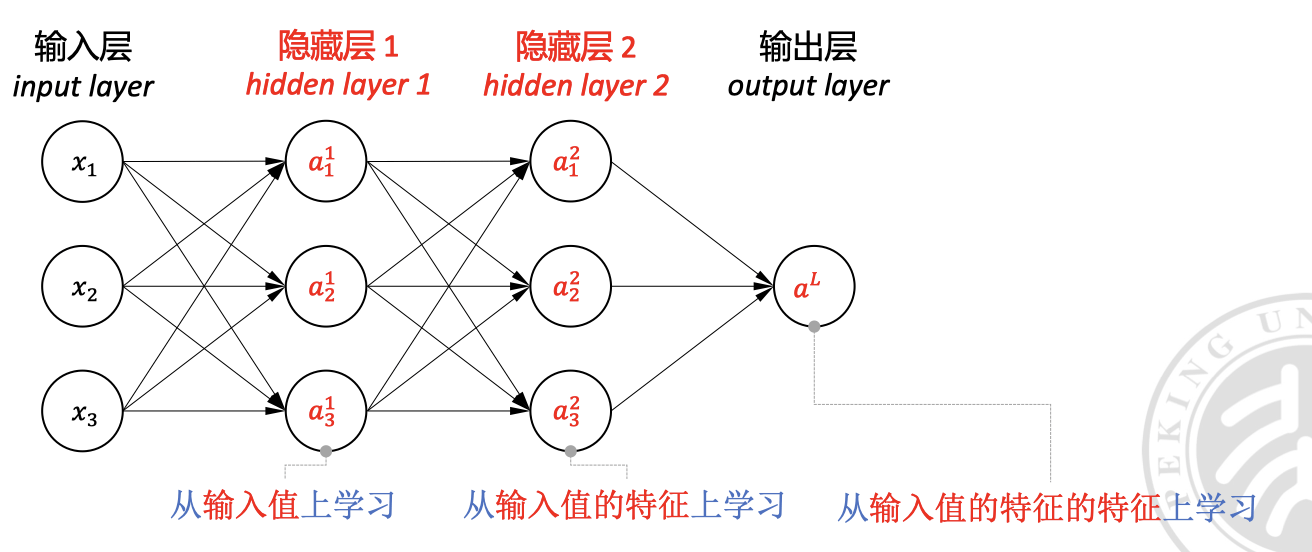
多层感知器是一种 前馈神经网络,它由 输入层 、 隐藏层 和 输出层 组成。
相较于单层感知器的线性决策边界,多层感知器通过将多个单层感知器叠加,后一个层将原有层的输出值当做特征值来学习,也就是 “在原有特征的基础上,再次进行特征提取(变换)”,从而具有更好的表达能力。这能更好的解决现实中更复杂的问题。
注意, 代表的是激活函数的输出,之前的 代表的是加权求和的结果。
- 代表层索引,,直接以输入值作为输入层可以写为
- 代表神经元索引,
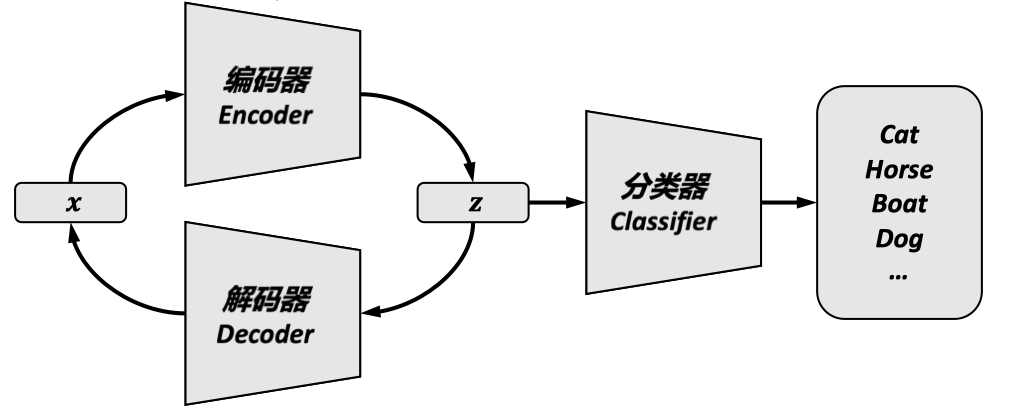
多层感知器可以进一步抽象成 Encoder-Decoder 模型,其中 Encoder 用于提取特征,Decoder 用于还原数据。
这个模型后续会在 RNN 和 Seq2Seq 中有所体现。现今大火的 Diffusion Model 也正是基于这个思想来设计的。
在当前学习的全连接 MLP 中,我们可以简单的认为除输出层外的所有层都是 Encoder,输出层是 Classifier。
损失函数#
损失函数 (loss function):用来量化网络 预测的输出(predicted output) 和 给定训练数据输出(ground truth) 之间的 误差 (error,也称 loss value) 。
损失函数用来设定优化神经网络参数(如权重、偏置)的目标,降低损失函数等价于优化神经网络,在此过程中,模型通过更新其参数来使得误差尽可能小。
梯度下降(gradient descent)是最常用的优化方法。
损失函数的选择:
首先,我们回忆一下之前我们是如何定义交叉熵的:
这里的 是指在给定输入 的情况下,输出 的概率。这个概率是由神经网络给出的,也就是 ,其中 是神经网络的输出函数。
分类问题:交叉熵损失函数(cross-entropy loss function)#
公式是:
其中:
- 是类别的总数
- 是一个独热编码向量,其中只有对应真实类别的那一项为 1,其余为 0
- 是神经网络输出的概率预测,对应于类别
- 上标 表示第 个样本。
第一个式子为单个样本的损失函数,第二个式子为多个样本的损失函数。
逻辑回归问题的损失函数#
二分类条件下的交叉熵损失函数:
其中:
- 是神经网络的输出,也就是模型预测的分类概率。
- 是真实值,也即标签
- 上标 代表第 个样本,而不是幂次。
由于 是标签,所以 和 有一个取值为 0 另一个为 1,这被用于选择正确的损失项,当真实标签 时, 项用于计算损失;当 时, 项用于计算损失。
第一个式子为单个样本的损失函数,第二个式子为多个样本的损失函数。
使用 GPT4 生成的从头推导(符号可能有些不一样)
逻辑回归的损失函数是从最大似然估计(Maximum Likelihood Estimation, MLE)推导而来的。
给定一组数据,MLE 的目标是找到模型参数(在逻辑回归中是权重 和偏差 ),使得观察到的数据出现的概率(似然)最大。
对于逻辑回归,似然函数可以写为:
其中:
- 是样本数量,
- 是第 个样本的真实类别,
- 是第 个样本的特征,
- 是模型关于参数 (即权重和偏差)预测的概率,
- 是模型参数。
取对数似然,我们得到对数似然函数:
在优化问题中,通常最小化负的对数似然,因此损失函数变为:
这就是逻辑回归中常用的损失函数,也称为对数损失(Log Loss)或交叉熵损失(Cross-Entropy Loss)。
回归问题:均方误差损失函数(mean squared error loss function,MSE)#
MSE 是 范数,往往用来衡量网络输出值 和训练数据输出值 的差别。
L 范数#
- 时,称为 L1 范数,MAE(Mean Absolute Error,平均绝对误差)。用于衡量两个向量之前差别的大小
- 时,称为 L2 范数,MSE(Mean Squared Error,均方误差)。用来衡量网络输出值 和训练数据输出值 的差别(MAE 也可以,区别在于 L2 范数对异常值更敏感)
优化#
目的:给定网络 和损失函数 ,以获得好的参数 ,最小化损失函数 。
最常用的优化方法是梯度下降(gradient descent)。梯度下降的思想是通过不断迭代来更新参数,使得损失函数最小化。
梯度下降#
- 称为学习率(learning rate)
- 称为梯度(gradient),代表损失函数 对权重 的偏导数
- 称为权重(weight), 代表权重的索引
- 称为权重向量(weight vector)
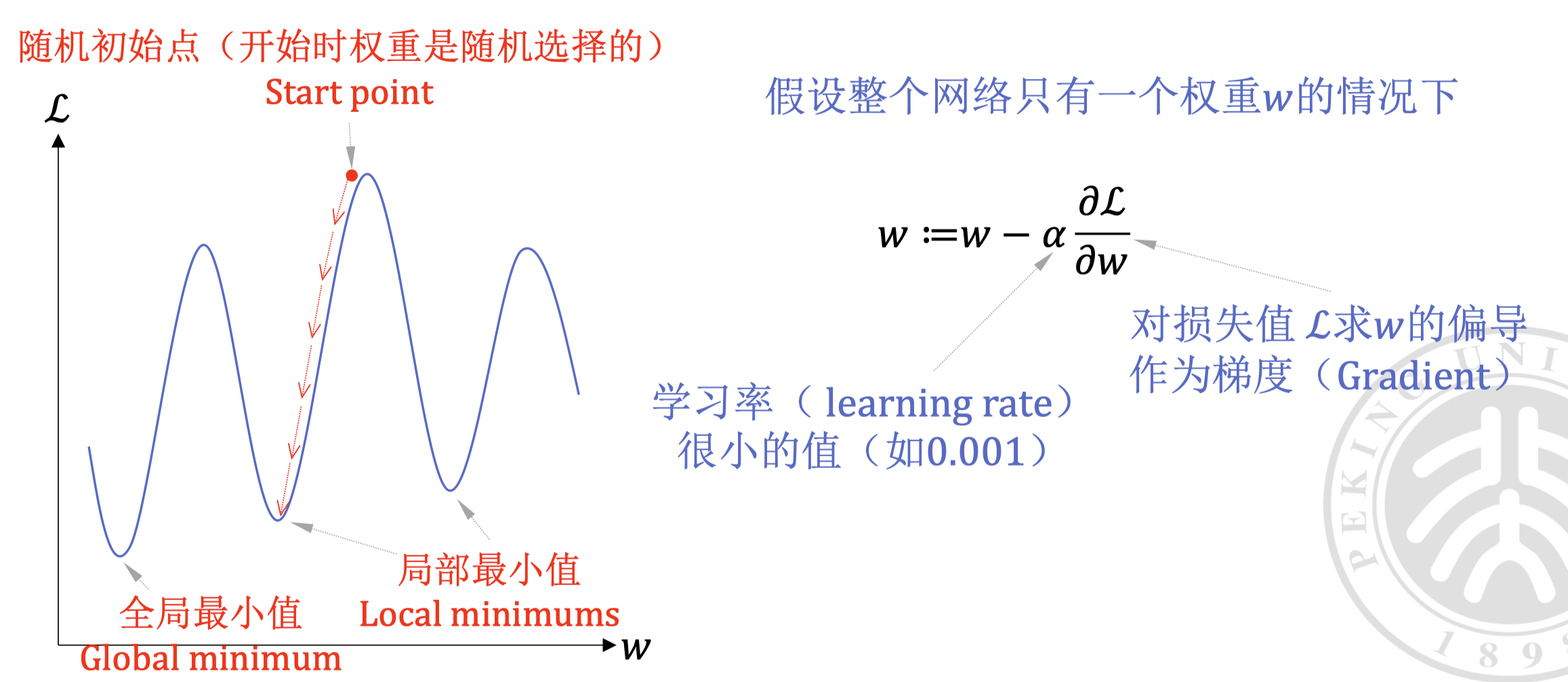
在更高的维度,可能无法很好的可视化这个过程,但是其思想是一样的。
无论有多少参数,我们只需要计算出梯度 即可优化每一个参数。
误差反向传播#
误差反向传播(Backpropagation,BP)是一种用于训练神经网络的方法,其就是梯度下降的思想的具体实现。
误差反向传播,也就是利用链式法则来计算损失函数对参数的梯度的方法。为了计算对于每个参数的偏导数,我们首先计算每个神经元的中间结果 ,也就是损失函数 对于神经网络中某一层的激活值 的偏导数 。
利用这个中间结果 ,我们可以计算损失函数对于每个参数 的偏导数 ,即最终我们需要的梯度。进而通过这个梯度,我们可以调整参数 来减少整个网络的损失。
图中展示了一个简化的神经网络结构,包含输入层、多个隐藏层和输出层。每一层都有多个神经元(用 表示),它们之间通过权重(即参数 )相连。在训练过程中,我们首先正向传播输入信号,然后根据输出和实际值计算损失,最后通过反向传播算法来更新权重,以此循环直至模型训练完成。
梯度消失(Gradient Vanish)/ 梯度爆炸(Gradient Explode) 问题#
在深度神经网络中,梯度消失和梯度爆炸是一个常见的问题。这是因为在反向传播过程中,梯度会随着层数的增加而指数级的减小或增大。
举个例子,考虑 Sigmoid 函数的导数:
在 Sigmoid 函数的导数中,当 趋近于正无穷或负无穷时, 趋近于 0。这就是梯度消失的原因。当梯度消失时,网络的训练将变得非常困难,因为梯度会在反向传播的过程中经过这些层时变得非常小,导致网络无法学习到有效的参数。
为了解决这个问题,我们可以使用 ReLU 函数来引入非线性:
它的导数在 时为 1,这样可以避免梯度消失的问题。
随机梯度下降(Stochastic Gradient Descent, SGD)#
到现在为止,我们所说的梯度下降(GD)都是基于整个数据集的。然而,当数据集非常大时,计算整个数据集的梯度是非常耗时的(非常昂贵的)。
在梯度下降的基础上,后来提出的随机梯度下降是一种更高效的优化方法。它不是在整个数据集上计算梯度,而是在每次迭代中 随机选择一批数据(mini-batch)来计算梯度 。
为什么可以这么做?原因如下:
其中:
- 是第 个数据点的损失函数
- 是整个数据集上的目标函数
- 是第 个数据点的梯度
- 是整个数据集上目标函数的真实梯度
- 是数据集的大小
- 是随机选择的数据点
这个公式说明,对于随机选择的 单个数据点 的梯度 的期望(即平均情况下的值)与整个数据集上目标函数 的真实梯度 的期望是相等的。
基于无偏估计(下降方向是对真实梯度方向的无偏估计)的假设,我们可以用它来近似真实梯度。
进一步的,为了充分利用硬件资源、减少单样本采样导致的抖动,我们选取通过 一批数据计算均值,再以此均值作为(估计的)梯度下降的方向,这一方法称为小批量随机梯度下降,这同样是一个无偏的近似,还降低了方差(减少了抖动)。
这里:
- 是第 次迭代的参数
- 是第 次迭代的参数
- 是学习率
- 是批大小,等于
- 是第 次迭代的数据索引集合,是在时间 时随机选择的的一个子集。
这一批数据的大小称为 批大小(batch size),通常是 32、64 或 128。这样,我们可以在每次迭代中更快地计算梯度,从而加速训练过程(相较于喂入整个数据集,也即一次完整的跑一个 epoch)。
通过多次更新参数,mini-batch 可以覆盖整个训练数据集,一个 epoch 则被称为覆盖一次整个训练数据集。
后续还会学到,我们可以在此基础上做 batch normalization 来加速训练、减少对初始化的依赖。
当然,SGD 也有它的缺点,比如可能会陷入局部最优解等等,我们会在后文中介绍其他的 SGD 变种,如 RMSprop、Adam 等。
学习率调度#
学习率(learning rate)是梯度下降算法中的一个重要超参数,它决定了参数更新的速度。
- 学习率太大会导致参数更新过快,从而错过最优解
- 学习率太小会导致参数更新过慢,从而训练时间过长
为了解决这个问题,我们可以使用学习率调度(learning rate schedule)来动态调整学习率。学习率调度可以根据训练过程中的不同阶段来调整学习率,例如每隔一定的 epoch 或当损失函数不再下降时。
学习率调度的常见方法有(非考试范围,了解即可):
Adagrad(Adaptive Gradient)#
Adagrad 是一种自适应学习率调整方法,它可以针对每个参数调整学习率,特别适合处理稀疏数据。Adagrad 的更新规则如下:
其中:
- 是到目前为止所有梯度平方的累加
- 是一个小的平滑项,防止分母为零
- 是初始学习率
Adagrad 的关键优点是不需要手动调整学习率,由于 不断累加,它能先快后慢地自动进行调整学习率。然而,它也存在一个缺点,随着训练的进行, 会不断累加,导致学习率趋于零,使得训练在后期几乎不再更新参数。
RMSprop#
RMSprop 是一种改进自 Adagrad 的自适应学习率方法。公式如下:
其中:
- 是梯度平方的指数移动平均
- 是衰减率,用于控制历史信息保留的多少
- 是当前梯度
- 是损失函数。
RMSprop 通过除以 来调整每一步的学习率,使得学习率逐渐减小。
在获得 后,我们以如下式子对参数进行更新:
与 Adagrad 不同,RMSprop 通过指数移动平均的方式来调整学习率,以丢弃遥远的梯度历史信息(让距离当前越远的梯度的缩减学习率的权重越小),从而使得学习率不会过早降低,从而更好地适应训练数据。
Adam(Adaptive Moment Estimation)#
为了克服 Adagrad 在训练后期学习率过小的问题,Adam 算法被提出。Adam 同时考虑了梯度的一阶矩(即梯度本身)和二阶矩(即梯度的平方)的指数移动平均,其更新规则如下:
其中:
- 和 分别是梯度的一阶矩和二阶矩的指数移动平均
- 和 是衰减率,通常接近 1
- 和 是对 和 的偏差校正,以便在训练初期得到更准确的估计
- 是学习率
Adam 结合了 RMSprop 和 Momentum 的优点,不仅自适应调整每个参数的学习率,还能利用梯度的一阶矩信息加速训练,在实际应用中表现良好。
如果你对动量 Momentum 不熟悉,可以参考 这篇文章 ↗。
超参数优化#
超参数选择(Hyper-Parameter Selection)的主要目的是找到一个合适的模型 ,使其 在训练数据集上不过拟合(overfit),同时在测试数据集上能很好地泛化(generalize)。
超参数 包括网络层数、神经元数、激活函数、批大小、训练 epoch 数等,对模型性能有重要影响。
三个数据集的区别:
- 训练数据集(Training Data)用于训练模型
- 验证数据集(Validation Data)用于评估和比较不同超参数组合对应的模型性能,并选择性能最佳的超参数
- 测试数据集(Test Data)用于最终评估选定的模型性能。不能用测试集来验证超参数性能,这是作弊。 因为其会导致模型过拟合测试数据。
交叉验证(Cross Validation) 是一种常用的超参数选择方法。它将数据分成多个子集,每次用其中一个子集作为验证集,其余作为训练集,遍历所有子集组合,从而避免了使用单一的验证集可能带来的偏差。
正则化#
动机:解决过拟合(Overfitting)。
过拟合:指的是模型 在训练数据上表现很好,但在测试数据上表现很差。
其原因是模型过于复杂,导致模型在训练数据上学习到了噪声,而不是真正的模式。当我们的模型参数过多,超过样本数量时,模型就会过拟合。
为了解决过拟合问题,我们可以使用正则化(Regularization)方法。其思想是,我们对于损失函数添加一个惩罚项,从而限制模型的复杂度,使其更容易泛化到未见过的数据。
提前停止法(Early Stopping)#
在训练过程中,我们不断地监控验证集的损失,当验证集的损失不再下降时,我们停止训练,从而避免模型过拟合。

权重衰减(Weight Decay)#
权重衰减是一种常用的正则化方法,其思想是通过在损失函数中添加损失项来限制权重的大小,从而减少模型的复杂度。
权重衰减只用于权重 weight,不用于偏置 bias。
L1 vs L2 正则化#
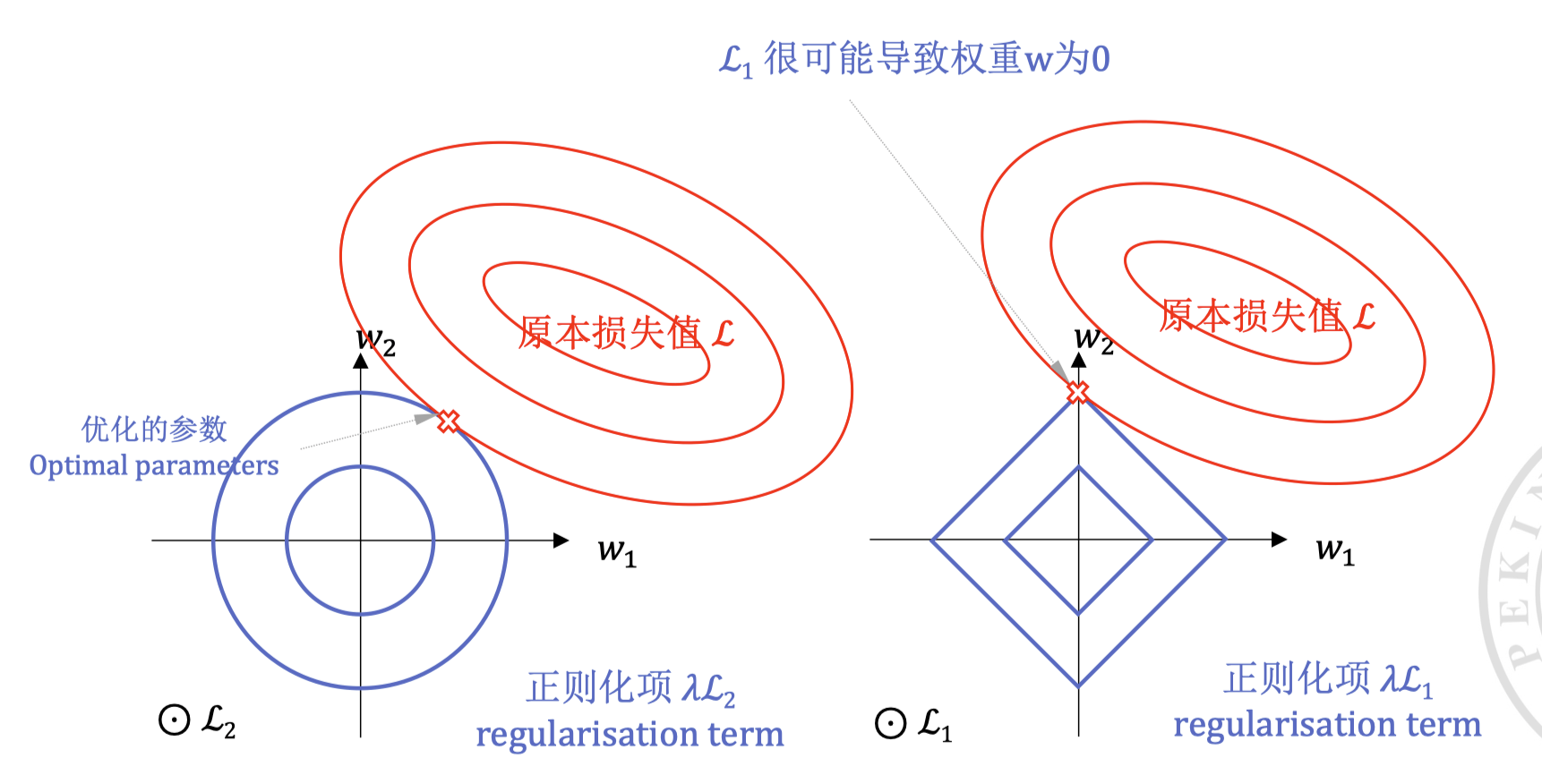
L1 对小的数值产生的惩罚比 L2 要大,因此(参数小于 1 时,其梯度更大)L1 正则化会使得模型更加稀疏,此称之为 稀疏特性,即更多的参数为 0。L2 正则化则会使得模型的参数更加平滑。
与之相反的,L2 不会产生稀疏解,所有参数都会被缩小但不会变成零。
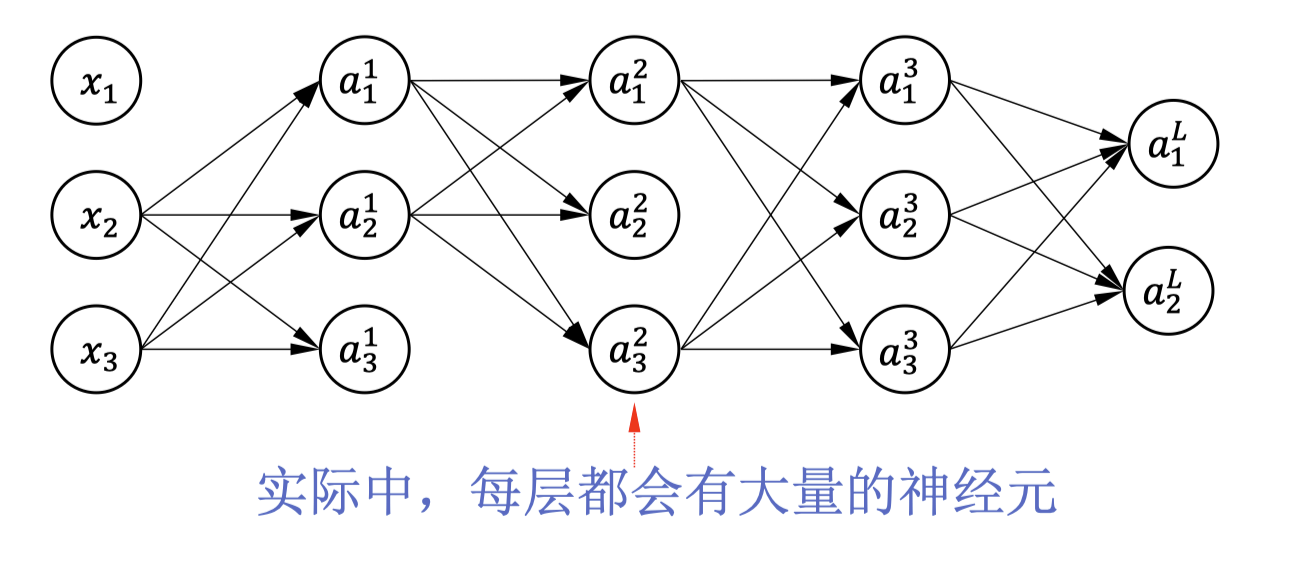
Dropout#
Dropout 是一种随机正则化方法,其思想是,因为包含大量神经元的神经网络使其很容易过拟合,所以可以在训练过程中 随机丢弃一部分神经元(对隐藏输出置 0),从而减少模型的复杂度,防止过拟合。
具体来说,Dropout 会以概率 随机丢弃一部分神经元,其余神经元的输出乘以 ,从而 保持其期望值不变。
测试 / 正常使用的时候,不再随机置 0 的原因:确保模型的输出稳定且充分利用训练时学到的所有信息。